Line feature data association method of robot based on improved ant colony optimization
A technology of data association and line features, applied in the field of data association, to achieve the effect of improving the accuracy of association
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings.
[0054] A method for associating line feature data based on an ant colony optimization algorithm, comprising the following steps:
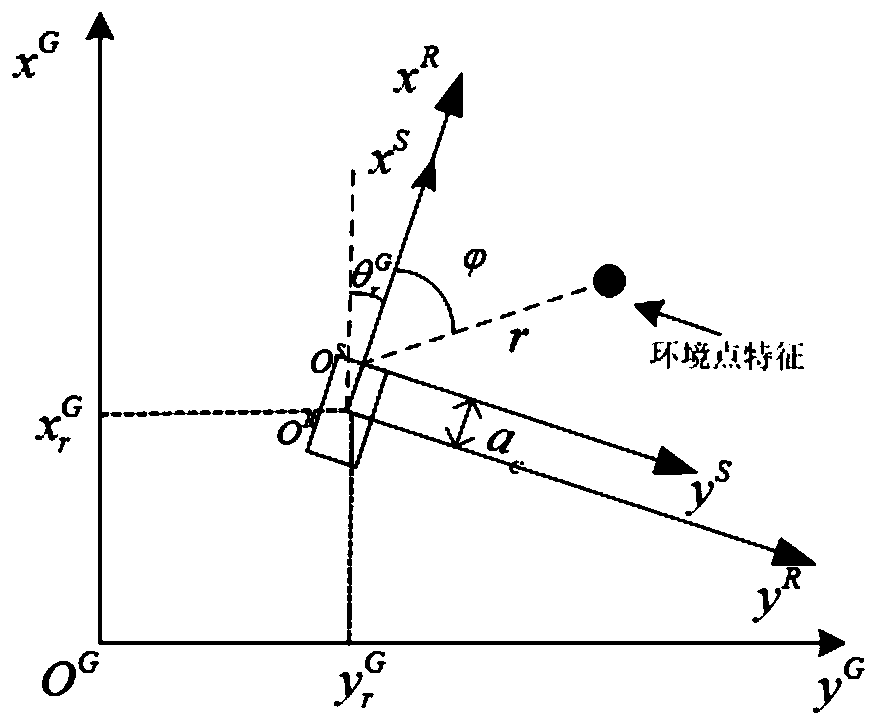
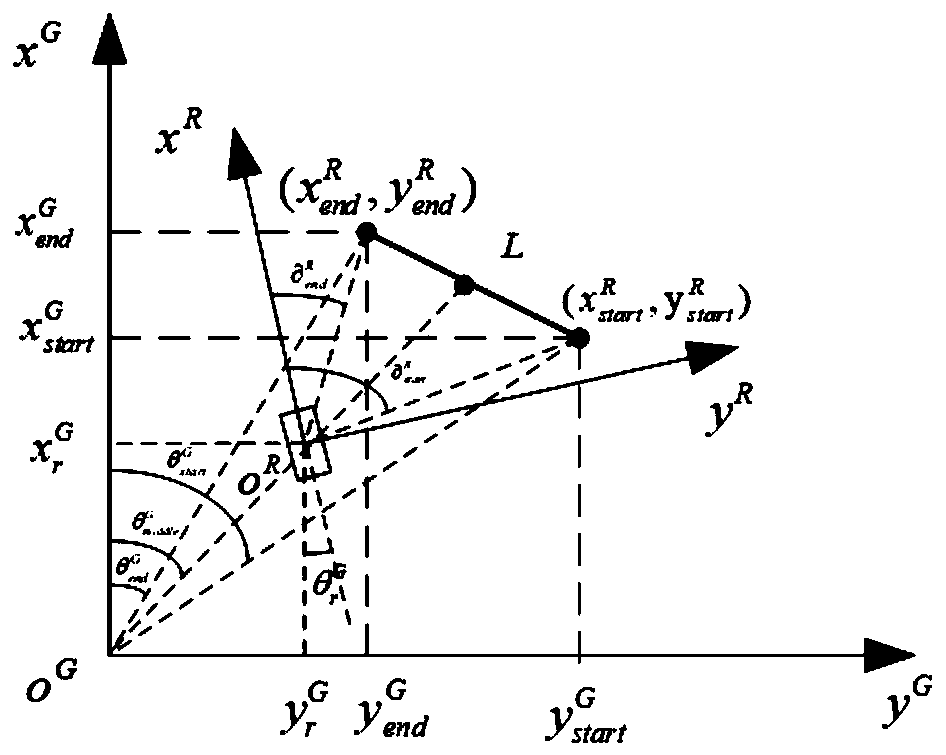
[0055] Step 1: Construct the global coordinate system and local coordinate system, and set the sensor working mode;
[0056] The coordinate origin of the global coordinate system is defined as the initial motion position of the robot, and the initial heading of the robot is the X-axis direction.
[0057] The local coordinate system includes the laser sensor coordinate system and the local coordinate system of the mobile robot. The coordinate origin of the laser sensor coordinate system is located in the X-axis direction of the robot coordinate system, and the distance between the coordinate origins of the two coordinate systems is set according to the simplified model of the robot. for a c .
[0058] The working mode of the laser sensor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



