

Normal-speed electrically-driven quadruped robot with adjustable gravity center and use method of normal-speed electrically-driven quadruped robot
A quadruped robot and electric drive technology, applied in electric vehicles, control drives, motor vehicles, etc., can solve the problems of quadruped robots that cannot walk smoothly, high cost of servo motors, and increased control difficulty, so as to avoid frequent speed changes, Reduce the difficulty of control and the effect of low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the above-mentioned features and advantages of the present invention more comprehensible, the following specific examples are given in conjunction with the accompanying drawings to describe in detail as follows, but the present invention is not limited thereto.
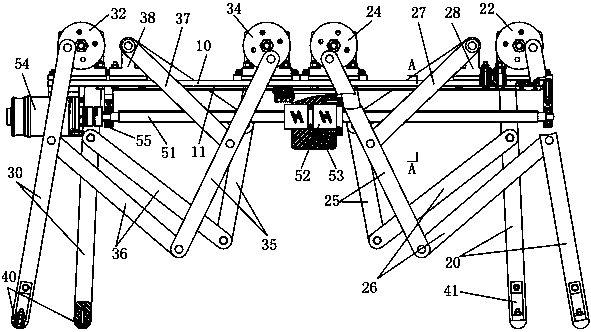
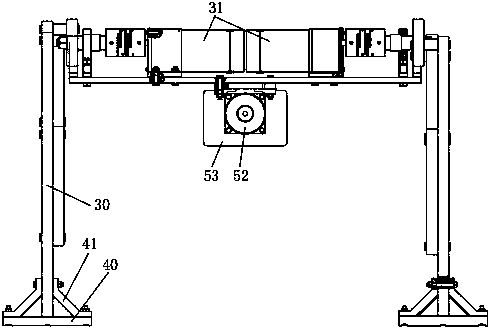
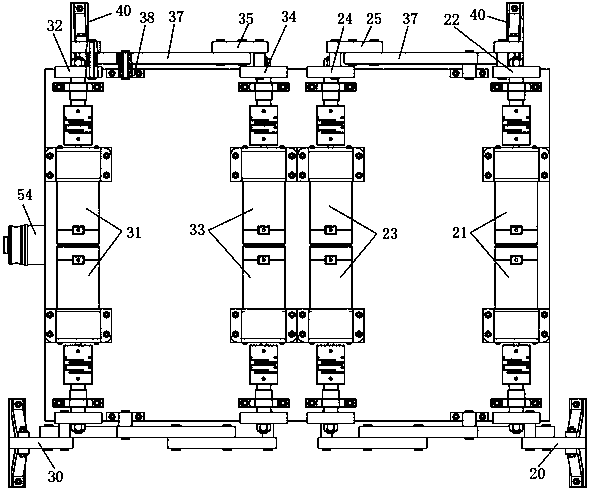
[0020] reference Figure 1 to Figure 4
[0021] A constant-speed electric-driven quadruped robot with an adjustable center of gravity includes a frame 10, and two front sides of the frame are respectively driven by a first crank and rocker mechanism installed on the frame and staggered to swing back and forth. The front calf bar 20, the rear side of the frame is respectively provided with a rear calf rod 30 driven by a second crank and rocker mechanism installed on the frame and staggered swinging, the front calf bar and the rear calf The lower ends of the rods are respectively provided with non-slip foot ends 40 transversely, and the lower part of the frame is provided with a center of gravity adj...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More