

Pilot following formation control method of rotor unmanned aerial vehicles based on rotation rejection field
An unmanned rotor control method technology, applied in the field of formation control, can solve the problem of easily falling into a local deadlock state, and achieve the effect of alleviating the local deadlock state and improving the efficiency of formation control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
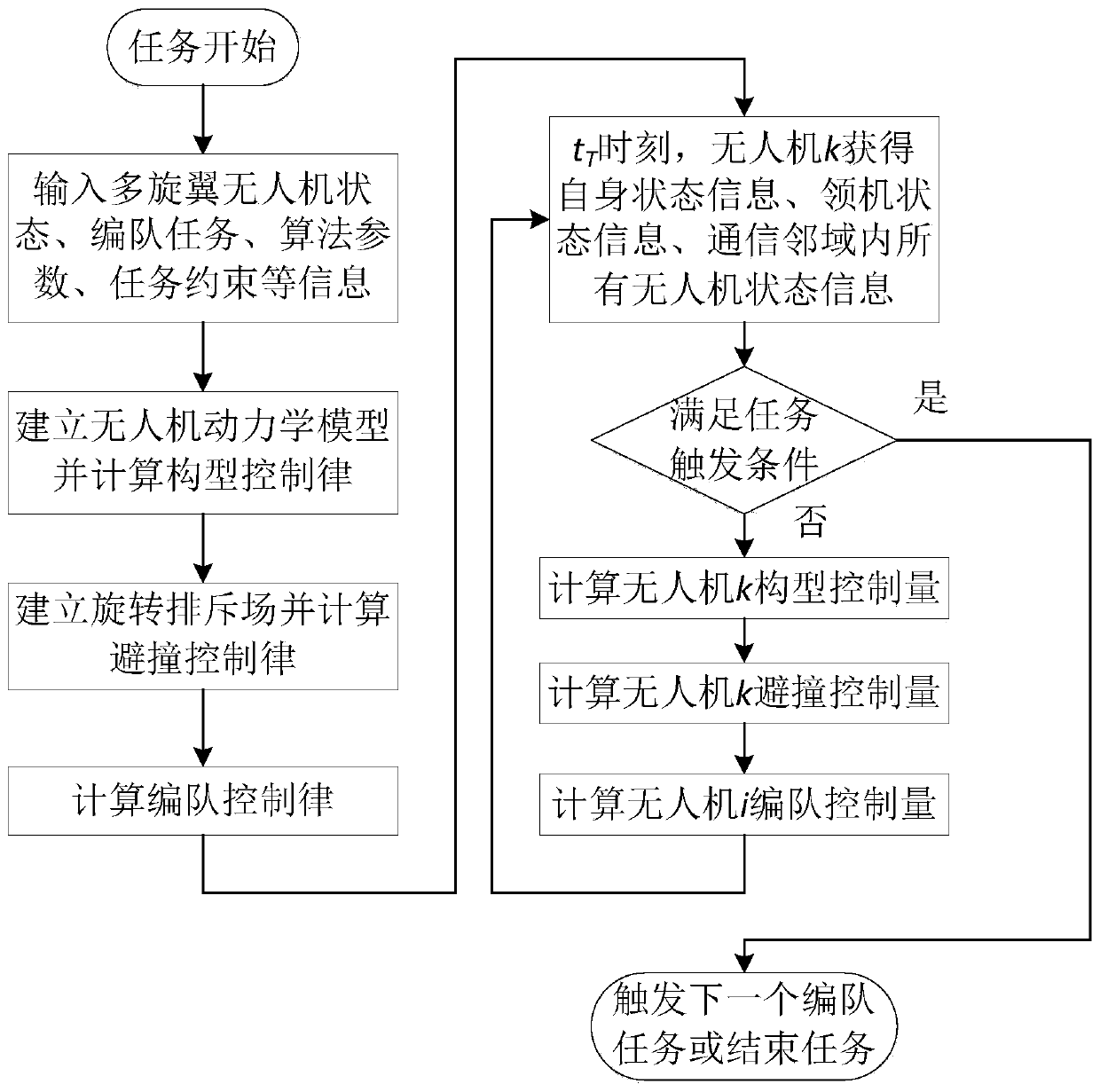
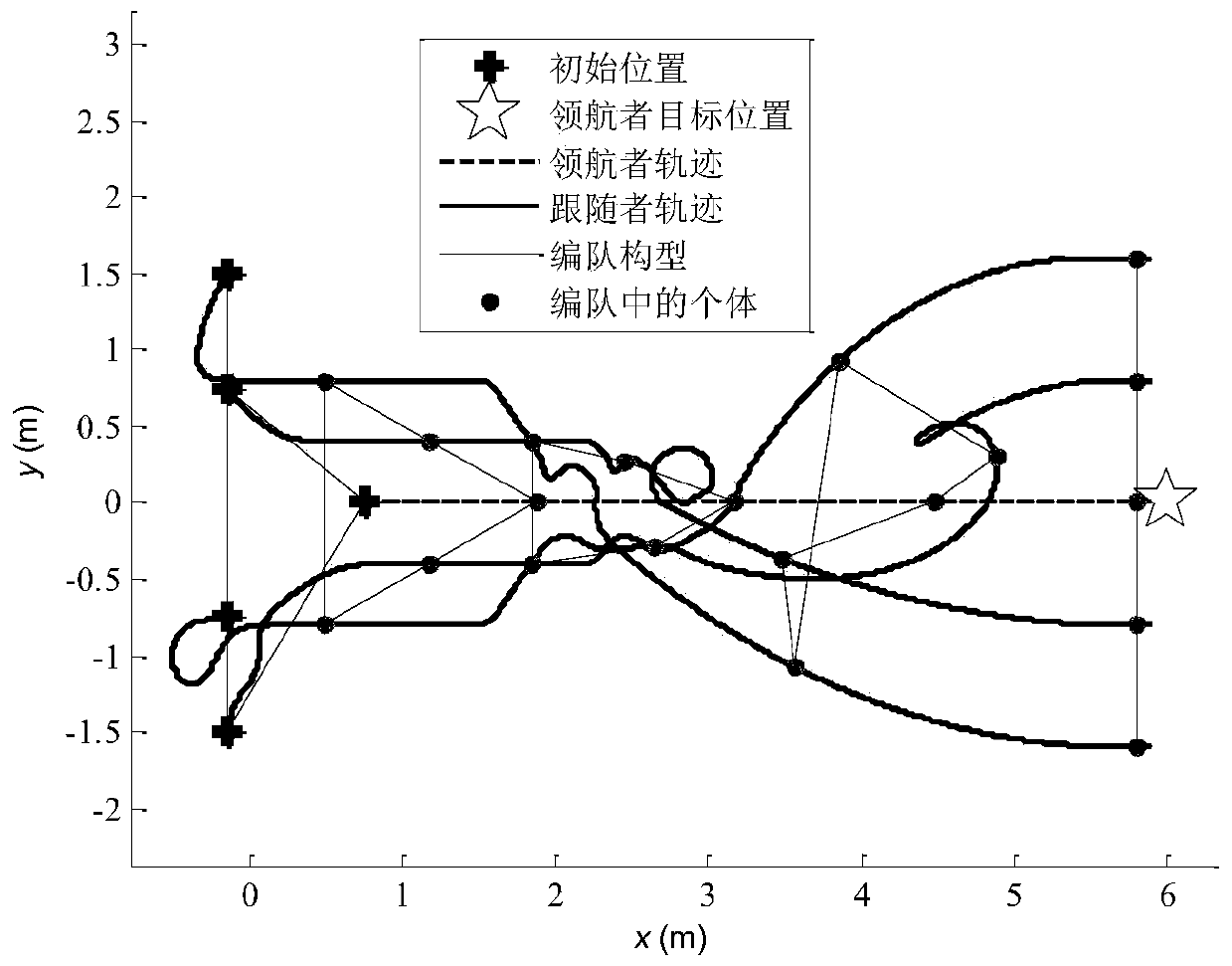
[0062] The feasibility and effectiveness of the rotor UAV formation control method based on rotation repulsion disclosed in this embodiment is illustrated through a single formation switching task scenario.
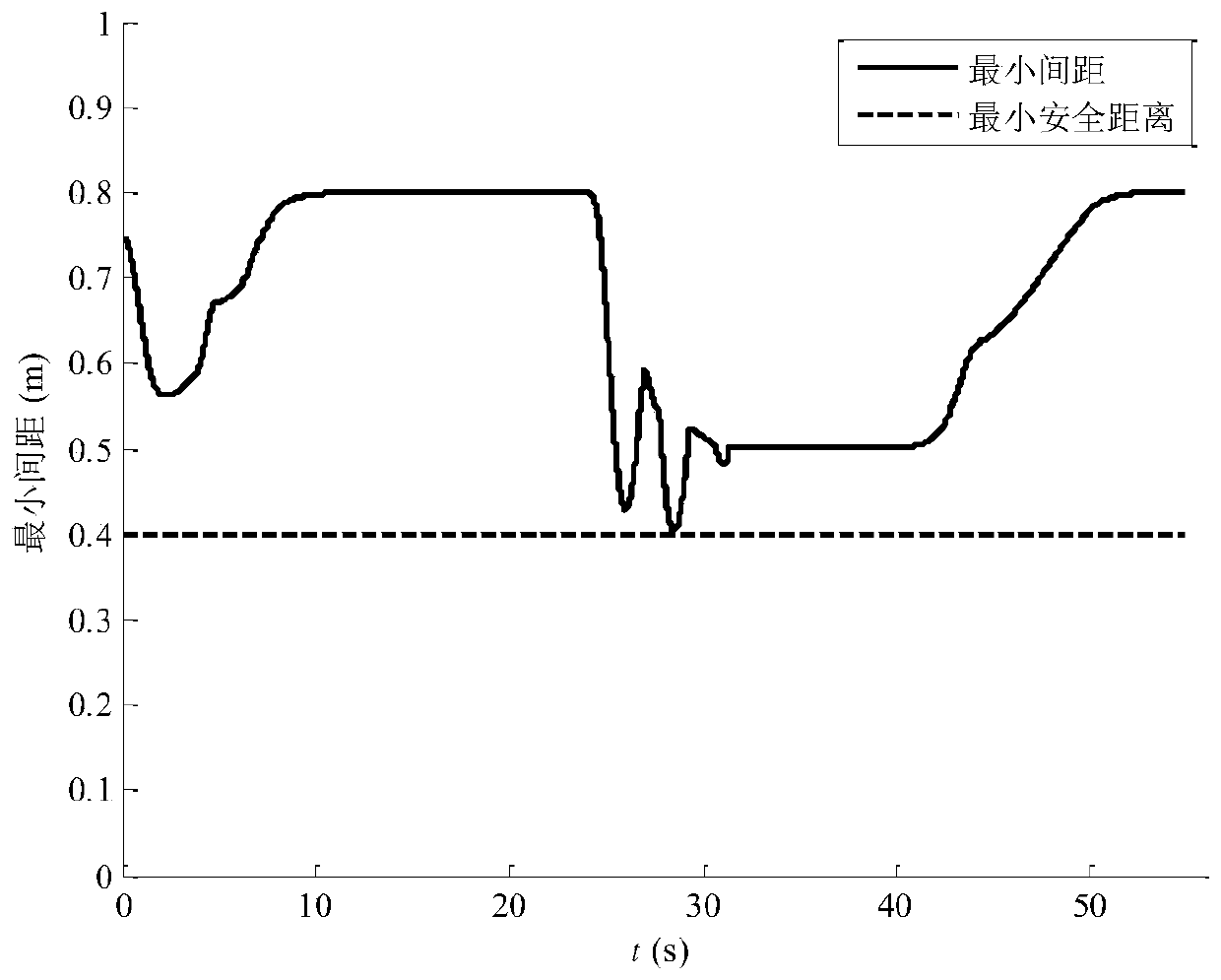
[0063] Five rotor drones will form an echelon formation from a stationary, unformed state and maintain that formation in motion. When the lead plane passes a certain trigger position, the formation switches from echelon formation to column formation and keeps moving in this formation until the lead plane reaches the trigger position at the end of the mission. Considering the collision avoidance constraints between rotor UAVs during the whole mission, the distance between rotor UAVs should not be less than the minimum safe distance of 0.4m.
[0064] The initial state of the rotor UAV is shown in Table 1. UAV 01 is the leader, and the rest are slaves. The control input constraints are as follows: in the speed coordinate system of the rotor UAV, u x ∈[-0.2,0.2]m / s 2 , u y...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More