

Lane line data fusion method based on high-precision map
A data fusion and lane line technology, applied in directions such as road network navigators, can solve problems such as difficulty in ensuring accuracy and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be described in detail below in conjunction with the accompanying drawings, so that those of ordinary skill in the art can implement it after referring to this specification.
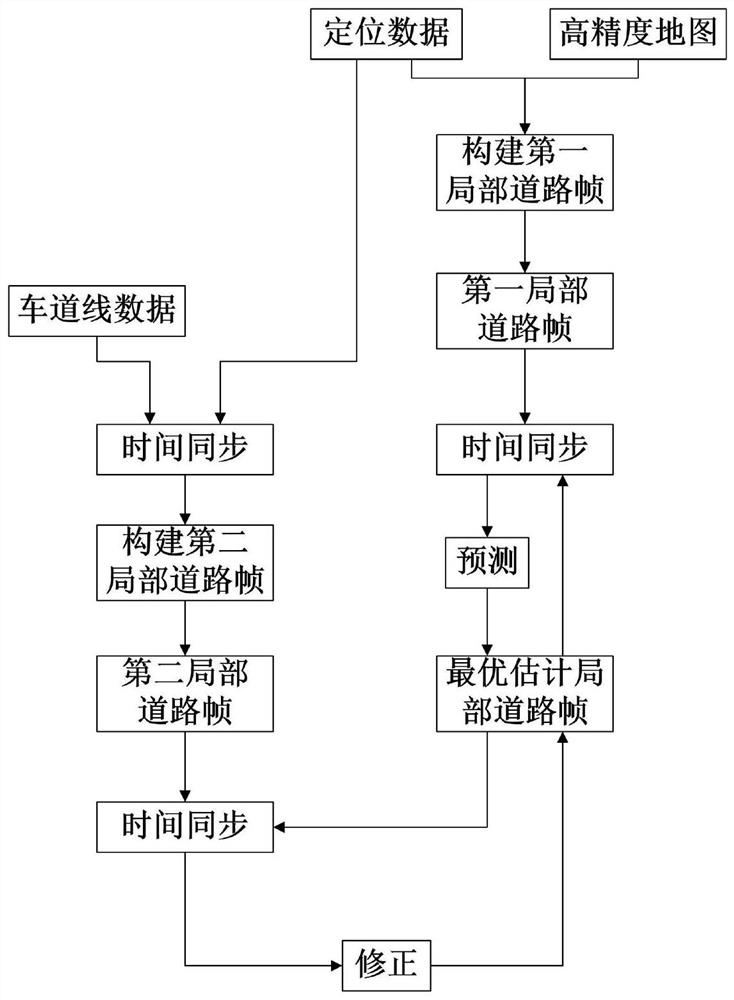
[0063] Such as figure 1 As shown, a high-precision map-based lane line data fusion method mainly includes the following steps:
[0064] S1. Combining the positioning data of the vehicle with the high-precision map and the lane line data sensed at the position corresponding to the positioning data to construct a first local road frame and a second local road frame;
[0065] S2. Obtain an optimally estimated local road frame according to the positioning data and the high-precision map; wherein, the optimally estimated local road frame refers to an optimal estimated value of the current local road frame;
[0066] S3. Timely synchronize the optimal estimated local road frame with the positioning data;
[0067] S4. Based on the first local road frame obtained in S1, update...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More