Path-following method for unmanned vehicles based on event-triggered model predictive control
A model predictive control and event-triggered technology, used in control/regulation systems, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as difficult to guarantee optimization, reduce the amount of calculation, and realize path following control. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Below in conjunction with accompanying drawing and embodiment example, the present invention will be further described:
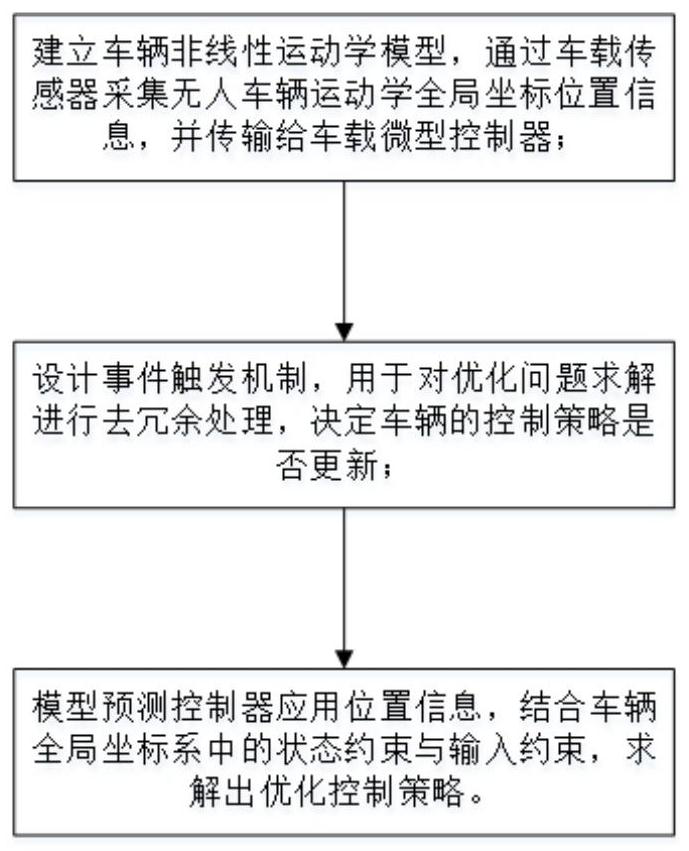
[0068] An unmanned vehicle path following method based on event-triggered model predictive control: comprising the following steps:
[0069] S1: Establish the nonlinear kinematic model of the vehicle, collect the kinematic global coordinate position information of the unmanned vehicle through the on-board sensor, and transmit it to the on-board microcontroller.
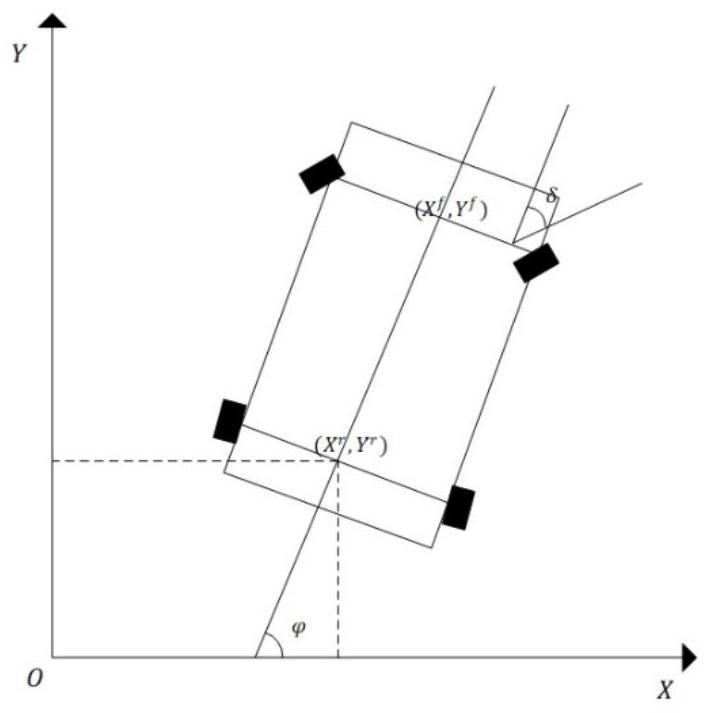
[0070] The establishment of vehicle nonlinear kinematics model includes:
[0071] Select the inertial system XOY as the global coordinate system, Indicates the heading angle of the vehicle, δ indicates the front wheel deflection angle, v r Indicates the front wheel speed, v f Represents the rear wheel speed, l represents the wheelbase of the vehicle, the superscript r represents the variables related to the central axis of the rear wheels, and the superscript f represents the variables r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com