

AGV planning method and device
A planning and node technology, applied in the direction of transportation and packaging, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problem of low execution efficiency of driving tasks, and achieve the effect of improving execution efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The specific implementation manners of the present application will be further described in detail below in conjunction with the drawings and embodiments. The following examples are used to illustrate the present application, but not to limit the scope of the present application.
[0059] Optionally, the present application takes the execution subject of each step in each embodiment as an example to describe the control terminal of the AGV, wherein the control terminal can be an electronic device with processing capabilities such as a computer, a mobile phone, a tablet computer, and a server. The embodiment does not limit the device type of the control terminal.
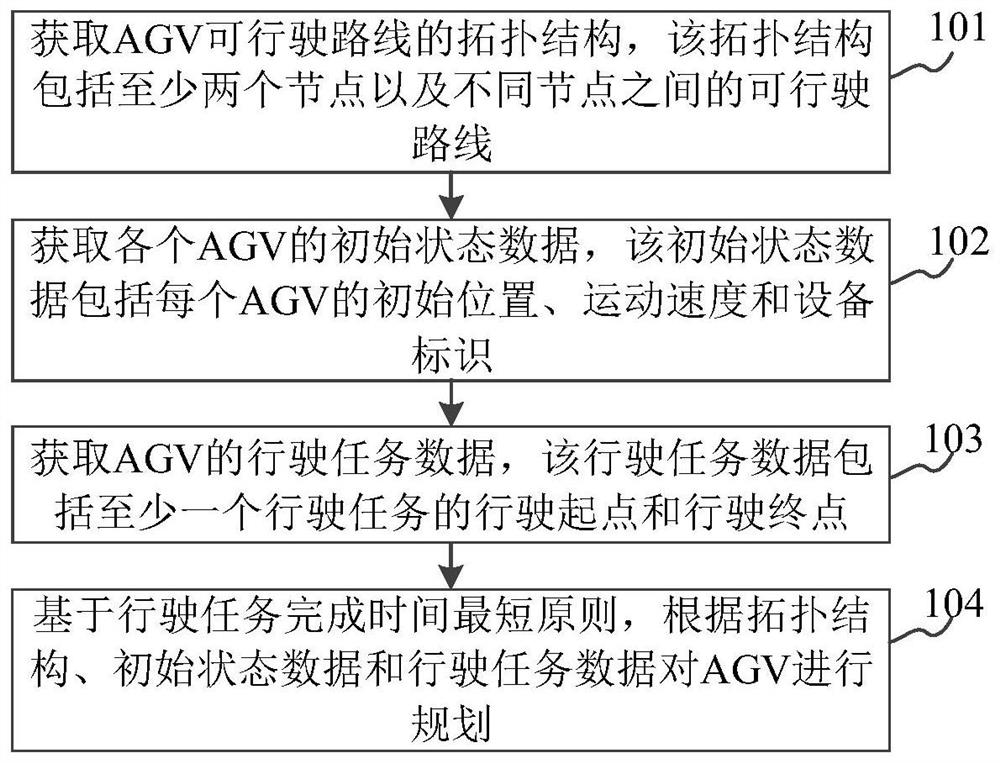
[0060] figure 1 It is a flowchart of an AGV planning method provided by an embodiment of this application. The method includes at least the following steps:
[0061] Step 101, obtain the topology structure of the AGV's drivable route, which includes at least two nodes and drivable routes between different n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More