A dense formation control method based on visual measurement information
A control method and visual measurement technology, applied in non-electric variable control, control/regulation system, three-dimensional position/channel control and other directions, which can solve the problems of inability to accurately obtain one's own position information, low measurement accuracy, and GPS system measurement deviation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be described in detail below in conjunction with the accompanying drawings.
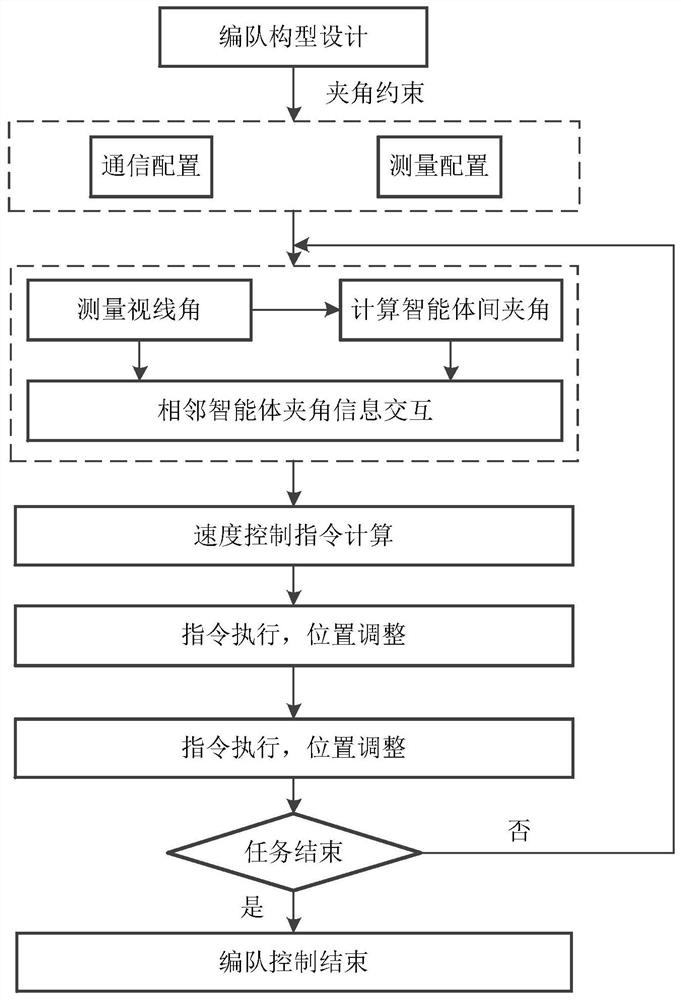
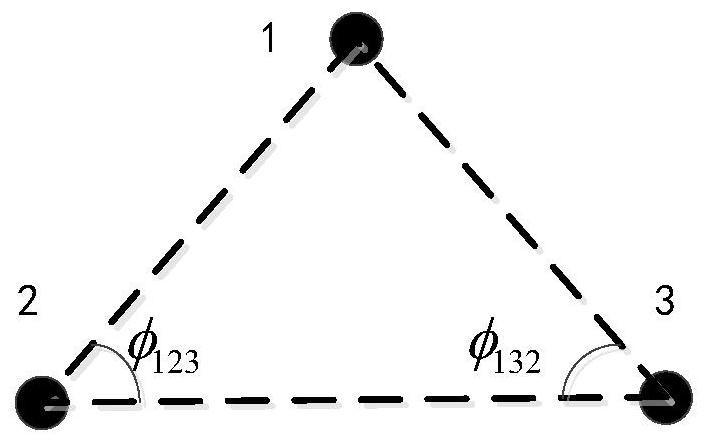
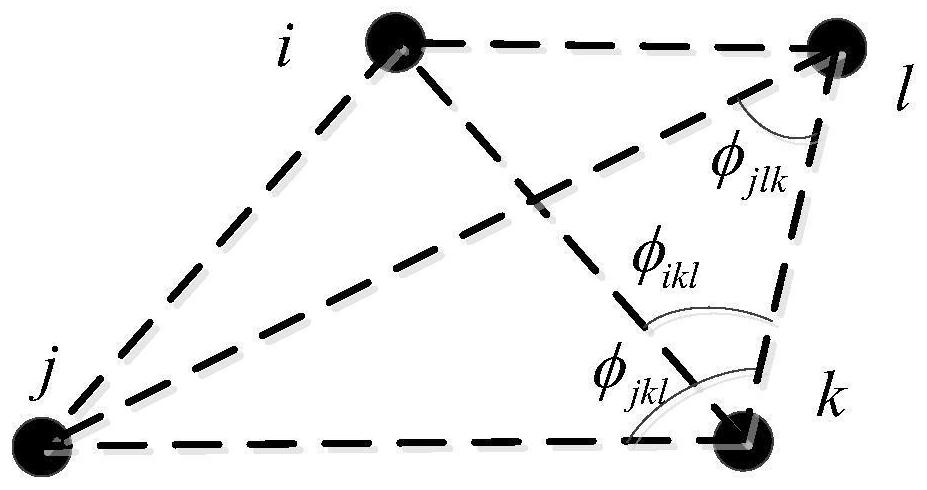
[0057] In order to avoid the influence of inertial navigation and GPS system's own positioning deviation on the dense formation control accuracy, the present invention proposes a formation control method based on visual measurement information. The measurement quantity of the visual sensor is a relative physical quantity, that is, the line-of-sight angle information, which directly reflects the relative geometric relationship between the agents. Compared with the inertial navigation and GPS system, the visual sensor has the characteristic that the smaller the distance between the agents, the higher the measurement accuracy. Based on this characteristic, the present invention proposes a formation control method based on visual measurement information. The invention firstly provides an association structure among agents suitable for visual measurement information to re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com