

Hip joint exercising mechanism with two degrees of freedom
A training mechanism, hip joint technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of poor mobility, only single-joint training, large body size, etc., and achieve rapid recovery, light weight, and simplified structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the purpose, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be described in detail below. Apparently, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other implementations obtained by persons of ordinary skill in the art without making creative efforts fall within the protection scope of the present invention.
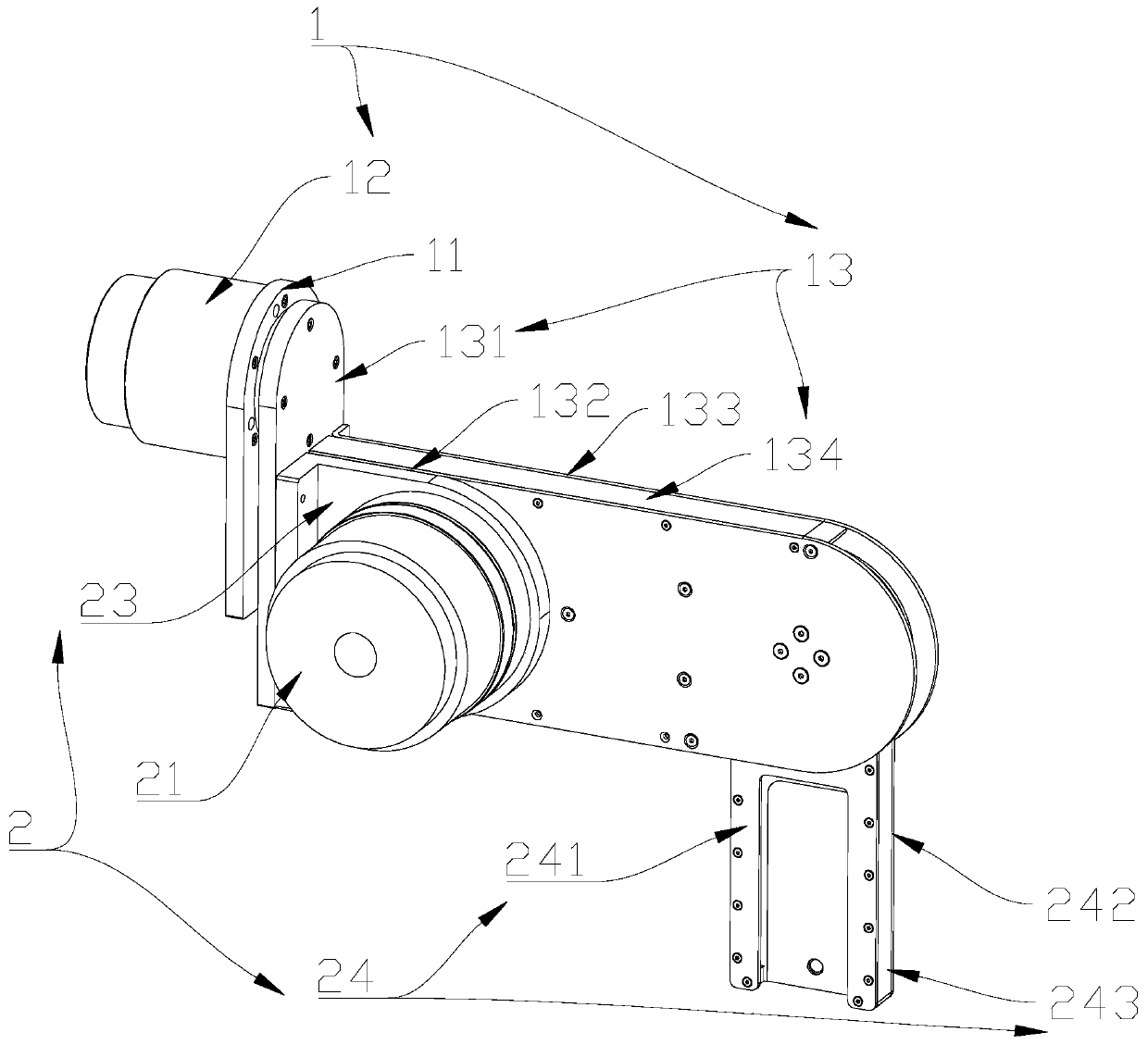
[0035] Such as figure 1 As shown, the present invention provides a two-degree-of-freedom hip joint training mechanism, comprising a left training unit for fixing the patient's left leg and a right training unit for fixing the patient's right leg arranged side by side, the left training unit and the right training unit The unit is a mirror-image symmetrical structure. Both the left training unit and the right training unit include the hip joint adduction and abd...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More