

Cluster four-dimensional trajectory planning design method under multi-target point simultaneous arrival constraint
A technology of trajectory planning and design method, which is applied in the space-time four-dimensional trajectory design of drone clusters reaching multiple target points at the same time, and the field of cluster four-dimensional trajectory planning and design. Distribution, low energy consumption effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific examples.
[0058] Step 1: Task Allocation Optimization
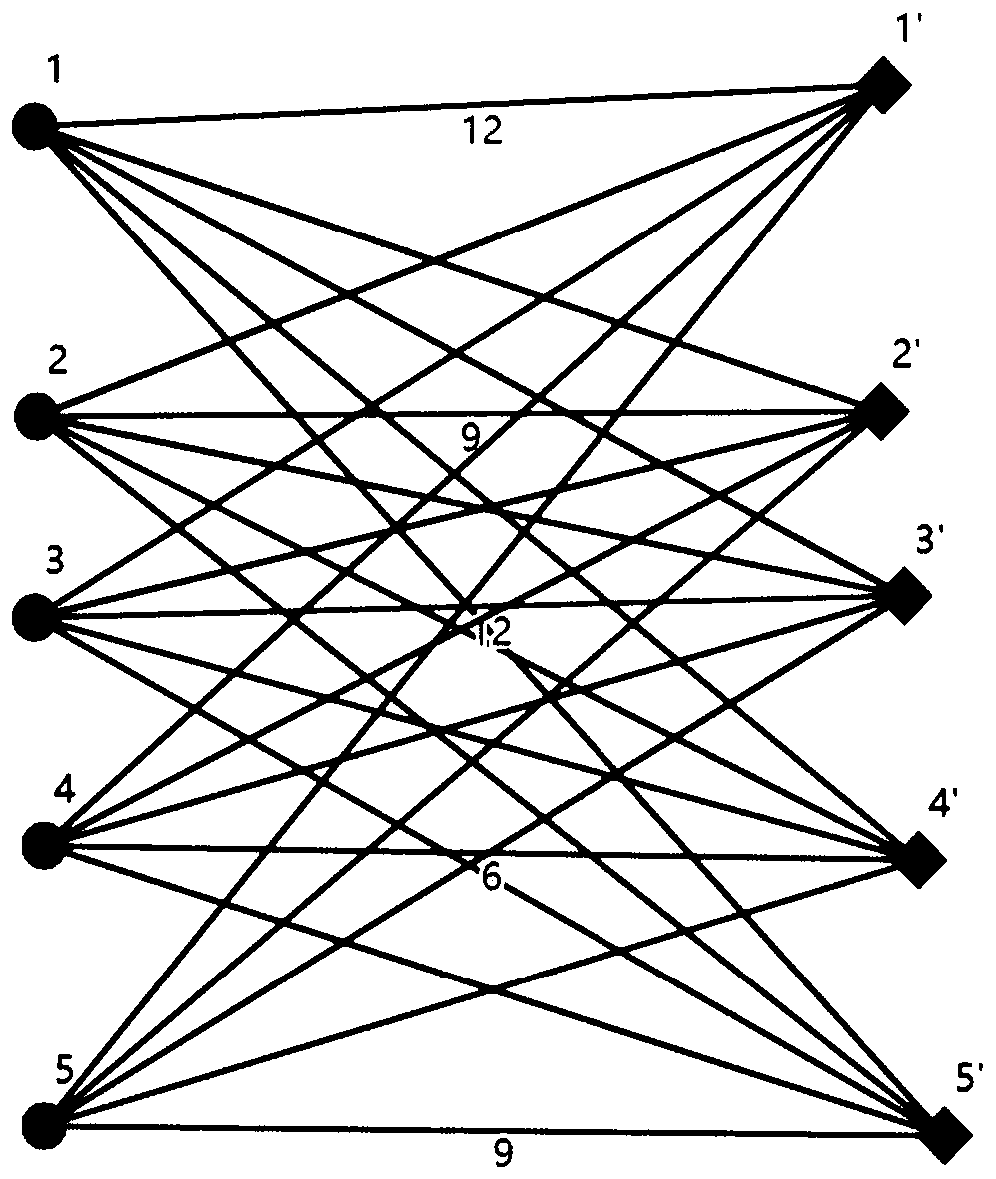
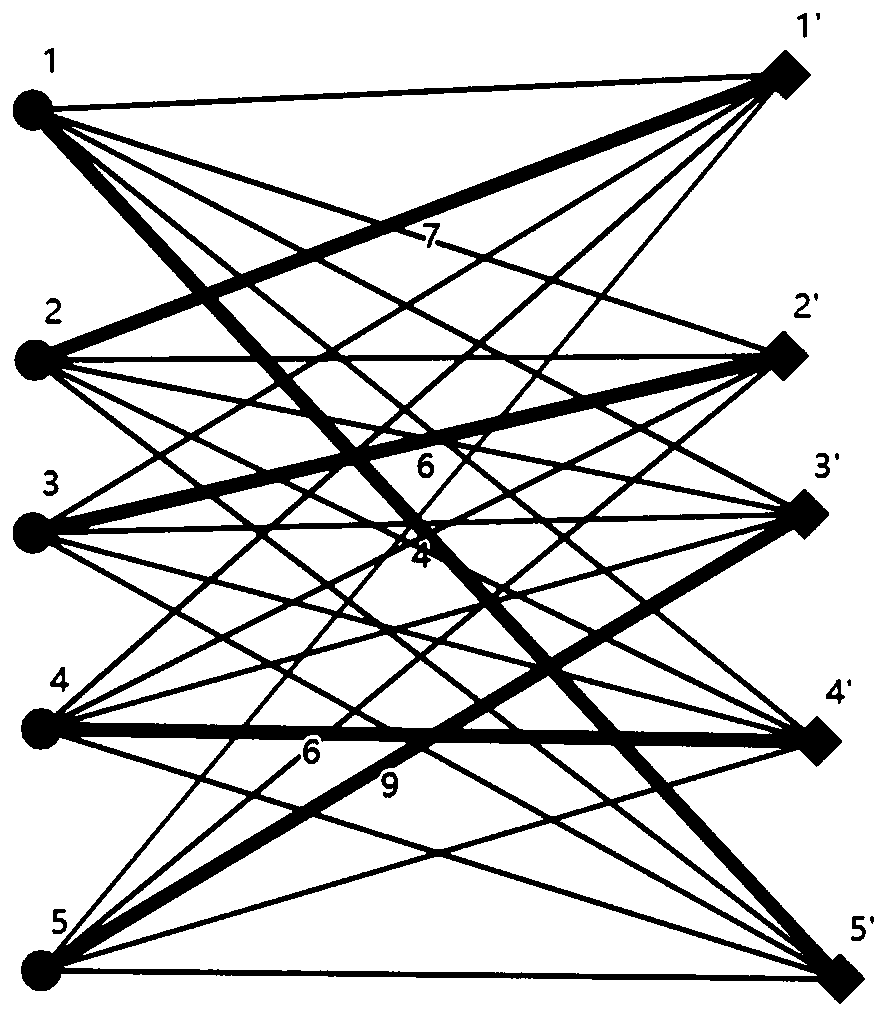
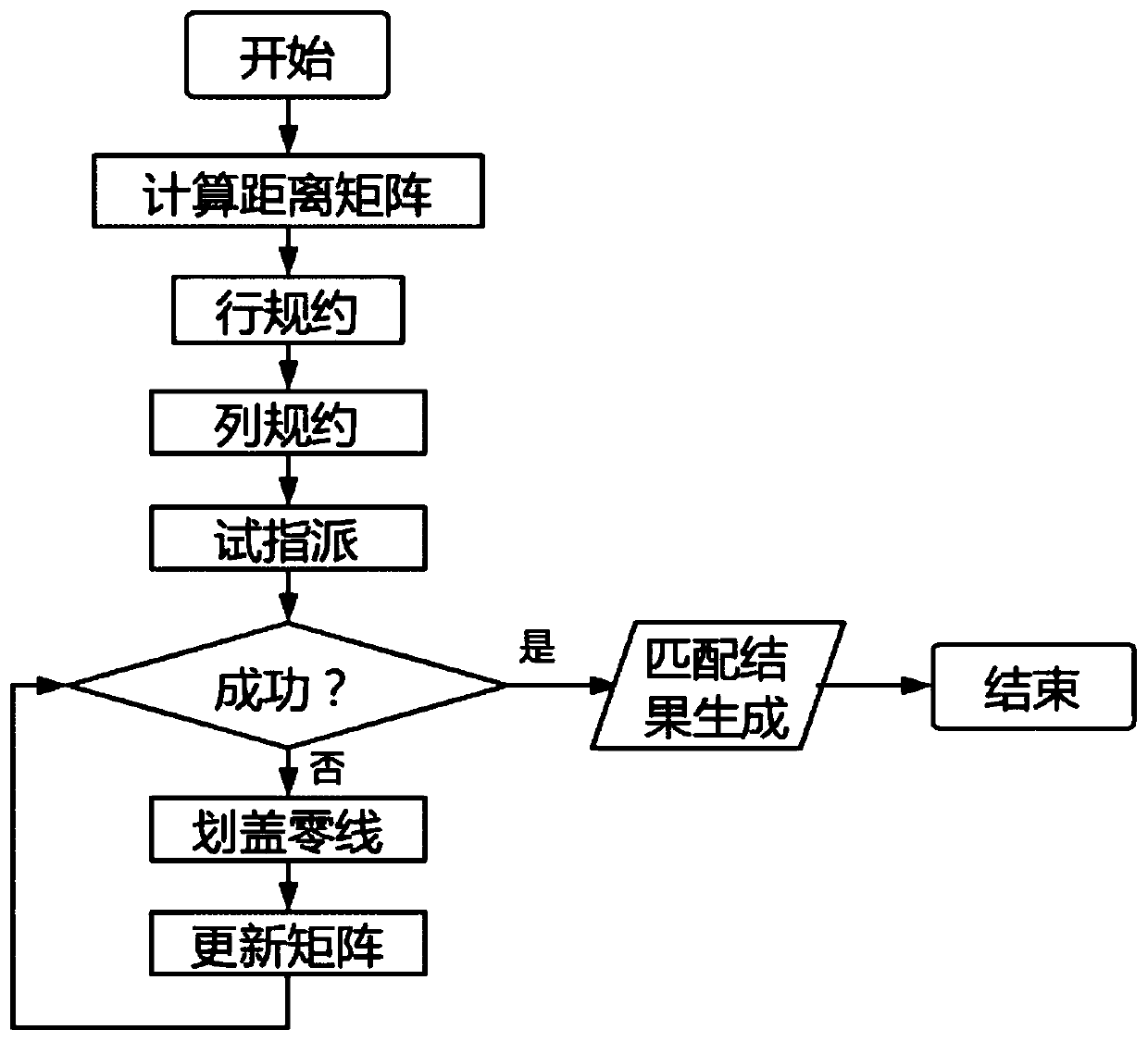
[0059] In the task of UAVs reaching multiple targets at the same time, it is the first step to assign different flight mission targets to each UAV. In order to make the energy consumption of all UAVs as low as possible and the total cost of performing tasks as low as possible, we need to make an optimal task allocation to make the sum of the paths of UAVs the shortest. This problem is similar to the assignment problem in the field of operations research, which can be abstracted essentially as the minimum matching problem for a given bipartite graph. From the previous assumptions, it can be known that this problem is a target balance assignment problem, so we use the traditional Hungarian algorithm to complete the optimization of task assignment.
[0060] The Hungarian algor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More