

Pneumatic mechanical grabbing device
A technology of mechanical grasping and installation grooves, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of easy shaking and large fit tolerance, and achieve the effect of two-way grasping stability, avoiding shaking, and constant gripping force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
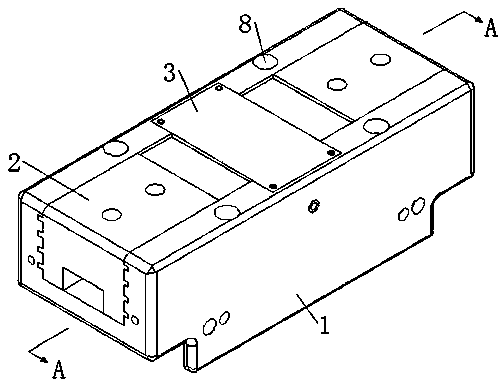
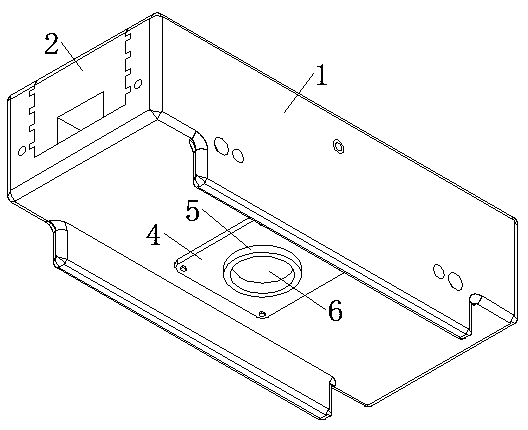
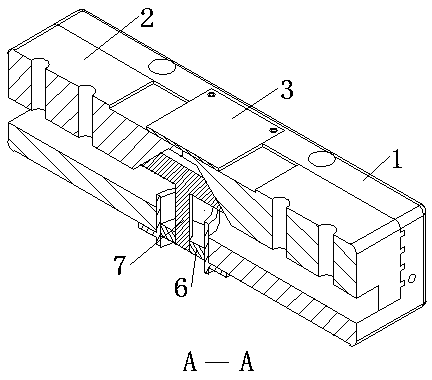
[0031] see Figure 1-8 , the present invention provides a technical solution: a pneumatic mechanical grabbing device, including a housing 1, the surface of the housing 1 is coated with a corrosion-resistant paint layer, the top of the housing 1 is provided with a mounting groove 11, and the front and rear of the mounting groove 11 The side wall is evenly provided with a right-angle chute 12 in the horizontal direction, a fixed card slot 13 is provided in the middle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More