

Target object detection method and device based on instance segmentation framework
A technology of target objects and frames, applied in the field of deep learning, can solve the problems of incomplete and inaccurate detection results, 2D position information cannot comprehensively and accurately reflect product feature information, etc., and achieve the effect of low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
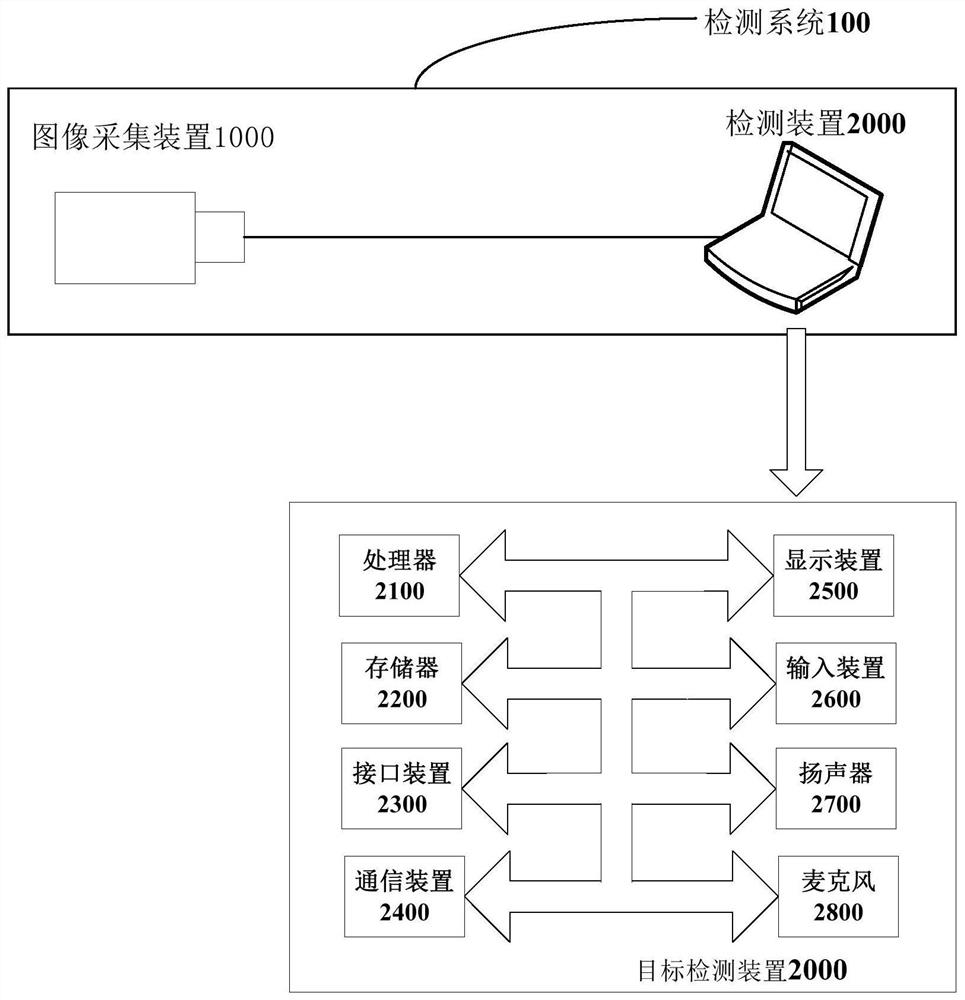
[0059] figure 1 is a block diagram of the hardware configuration of the detection system 100 according to the embodiment of the present invention.
[0060] Such as figure 1 As shown, the detection system 100 includes an image acquisition device 1000 and a target object detection device 2000 based on an instance segmentation framework.
[0061] The image acquisition device 1000 is configured to acquire a 2D image to be detected, and provide the acquired 2D image to be detected to the detection device 2000 .
[0062] The image acquisition device 1000 may be any imaging device capable of taking pictures of the object to be detected, such as a camera.
[0063] The detecting device 2000 may be any electronic equipment, such as a PC, a notebook computer, a server, and the like.
[0064] In this example, refer to figure 1 As shown, the detection device 2000 may include a processor 2100, a memory 2200, an interface device 2300, a communication device 2400, a display device 2500, a...
Embodiment 2
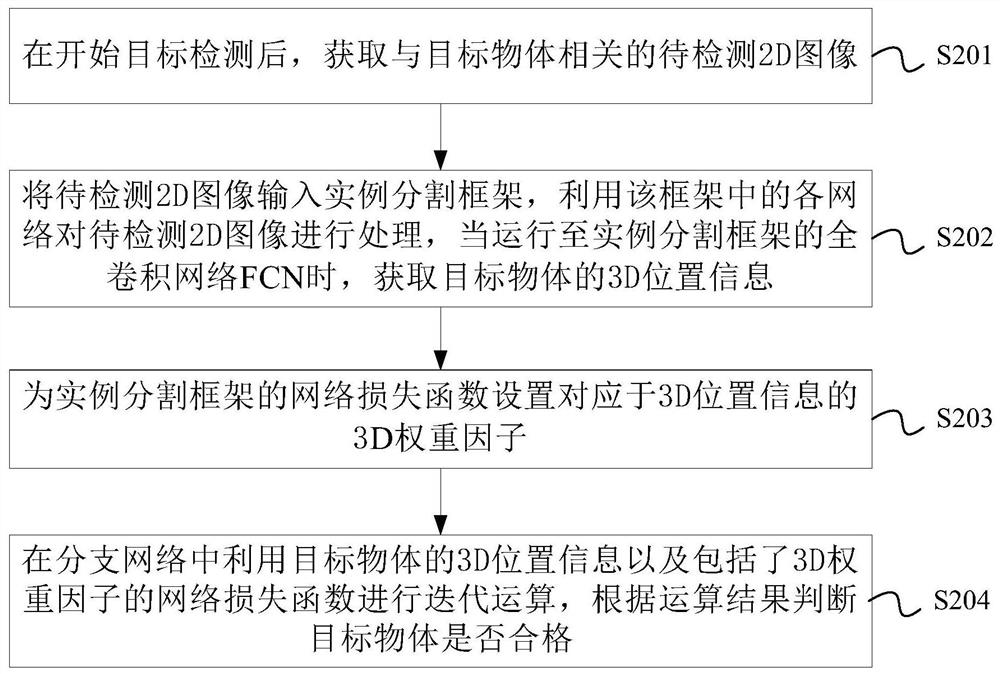
[0071] This embodiment provides a method for detecting a target object based on an instance segmentation framework, the method is as follows figure 2 As shown, including the following S201-S204:
[0072] S201. After starting target detection, acquire a 2D (Dimensional) image to be detected related to the target object.
[0073] In this embodiment, the target object refers to a product whose qualification needs to be determined, or a component in the product whose qualification needs to be determined. For example, the target object may be a patch capacitor on a PCB (Printed Circuit Board).
[0074] The 2D image to be detected is a 2D image obtained by taking pictures of the target object to be detected. The 2D image to be detected is related to the target object. That is to say, the target object is included in the 2D image to be detected. Of course, the target object may not be included in the 2D image to be detected.
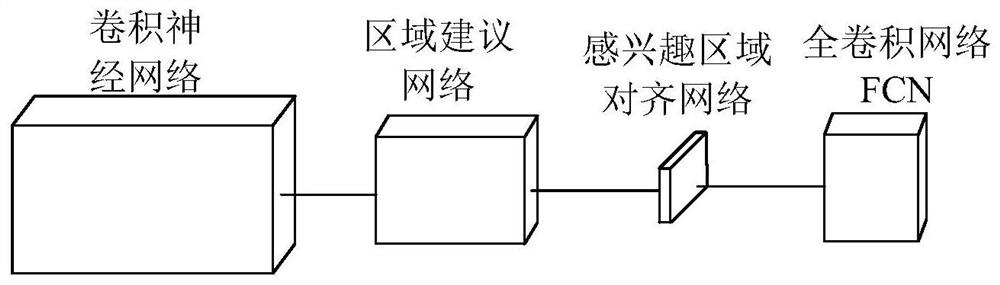
[0075] S202. Input the 2D image to be detected into...
Embodiment 3
[0084] In this embodiment, the 3D position information of the target object obtained in S202 is represented by three rotation angles and three position offsets in three-dimensional space relative to the reference position. Based on this, the acquisition of the 3D position information of the target object in the above S202 includes the following steps S2021:
[0085] Obtain three rotation angles and position offsets of the target object relative to the reference position in three-dimensional space, and form a four-dimensional space vector as the 3D position information of the target object.
[0086] In this embodiment, the reference position is generally the position of the upper left corner of the 2D image to be detected.
[0087] In one example, a three-dimensional space can be represented by a three-dimensional coordinate system. The origin of the three-dimensional coordinate system may be the above-mentioned reference position, that is, the position of the upper left corne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More