

Method and device for actively avoiding obstacle by vehicle and automobile
An obstacle and active technology, which is applied in the field of vehicle actively avoiding obstacles, can solve the problems such as the limited cut-in and cut-out conditions of the target vehicle, and the need to improve the recognition rate of stationary targets.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0124] Exemplary embodiments of the present invention will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present invention are shown in the drawings, it should be understood that the invention may be embodied in various forms and should not be limited to the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present invention and to fully convey the scope of the present invention to those skilled in the art.
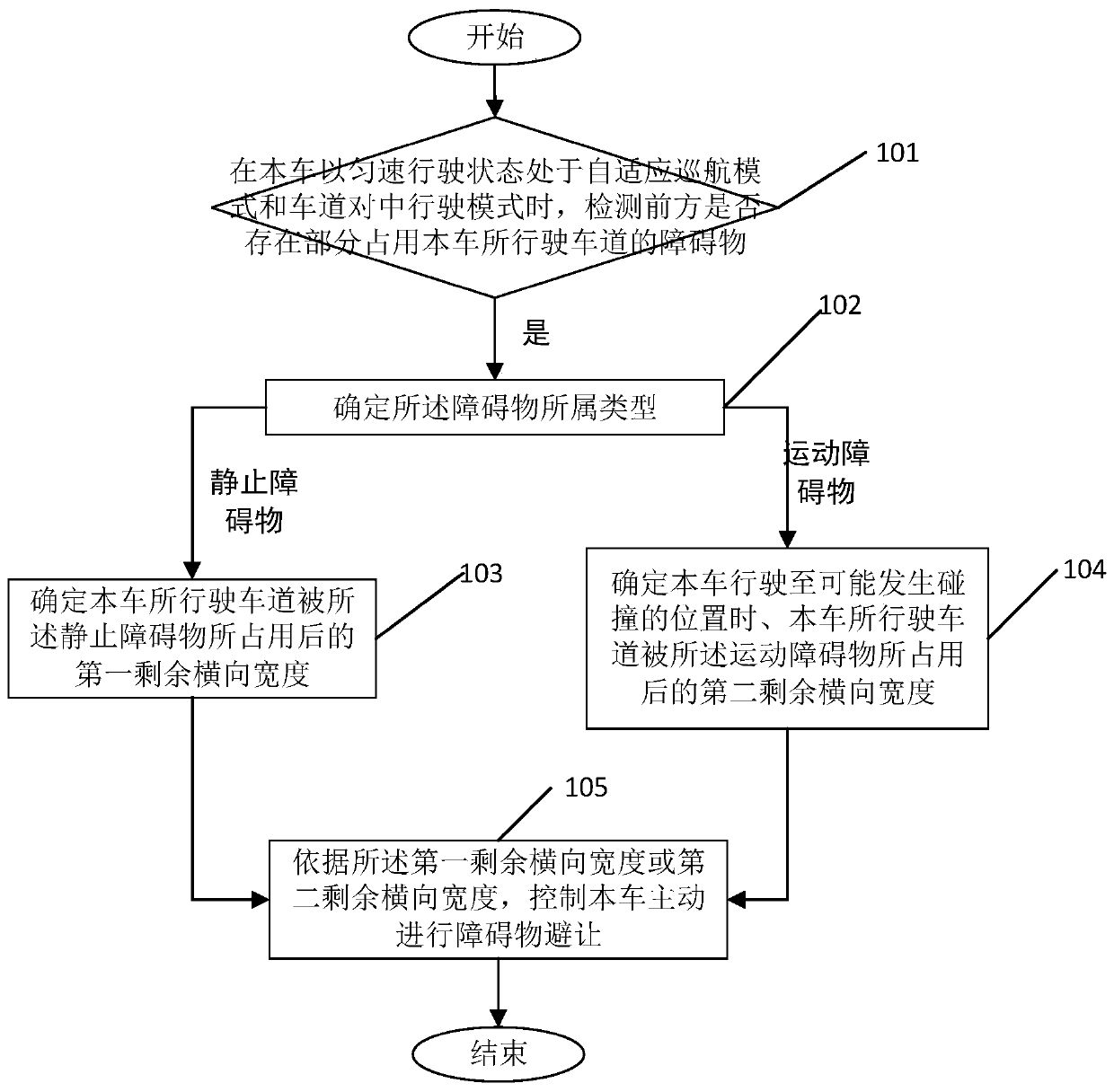
[0125] In the present invention, the existing millimeter-wave radar and camera fusion on the vehicle are used to realize the effect of intelligently actively avoiding obstacles. Specifically, a central control module DAS, a front radar FR, and a front camera FC are used And two front corner radars FLC and FRC architecture, when there is an obstacle occupying the lane ahead of the vehicle, it will automatically control the vehicle to perform safe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More