

Region recognition method, robot and storage medium
A technology of area recognition and robots, which is applied in the field of robots, can solve problems such as the robot entering the wrong area by mistake, the robot cannot accurately identify the virtual wall area, and reduce the accuracy of the robot to the virtual wall, so as to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
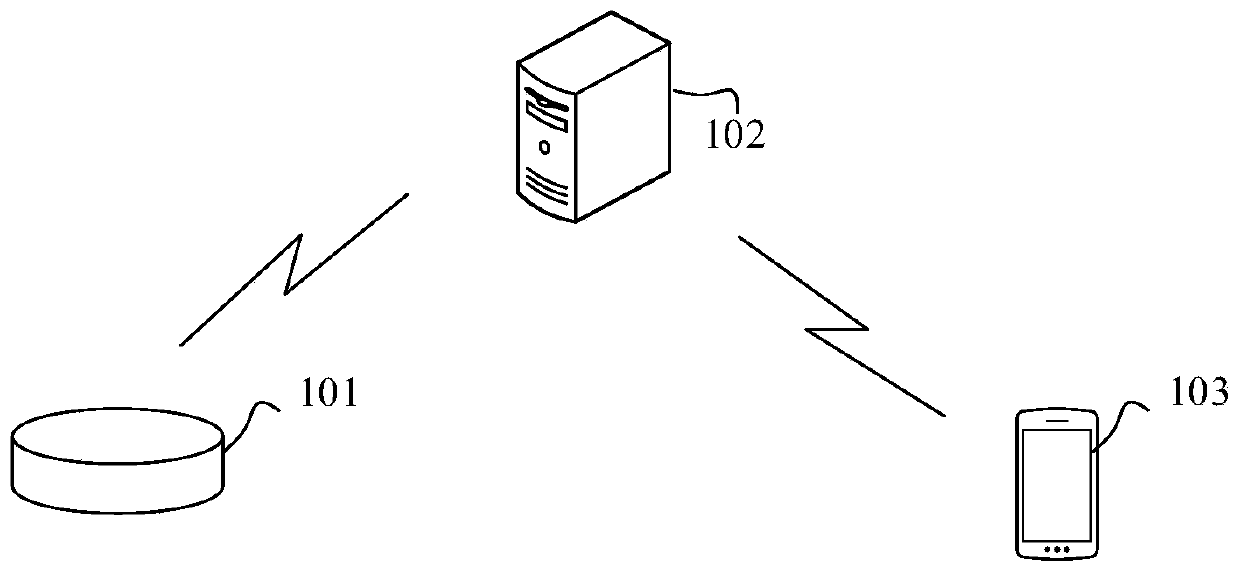
[0072] The region identification method provided by this application can be applied to such as figure 1 In the implementation environment shown. In one embodiment, the robot 101 can communicate directly with the end device 103 . In another optional embodiment, the robot 101 can communicate with the server 102 , and the server 102 can communicate with the terminal device 103 . Among them, the robot 101 can be but not limited to various intelligent robots, self-moving robots and sweeping robots, the server 104 can be realized by an independent server or a server cluster co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More