

A bionic pipe crawling robot
A crawling robot and robot technology, which is applied in the field of bionic robots, can solve the problems of small steering and climbing angles, slow crawling speed, stuck in curves, etc., so as to avoid accidents.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
[0029] In the description of the present invention, it should be understood that the terms indicating orientation or positional relationship are based on the orientation or positional relationship shown in the drawings, and are only for the convenience of describing the present invention and simplifying the description, rather than indicating or implying No device or element must have a particular orientation, be constructed, and operate in a particular orientation, and therefore should not be construed as limiting the invention.
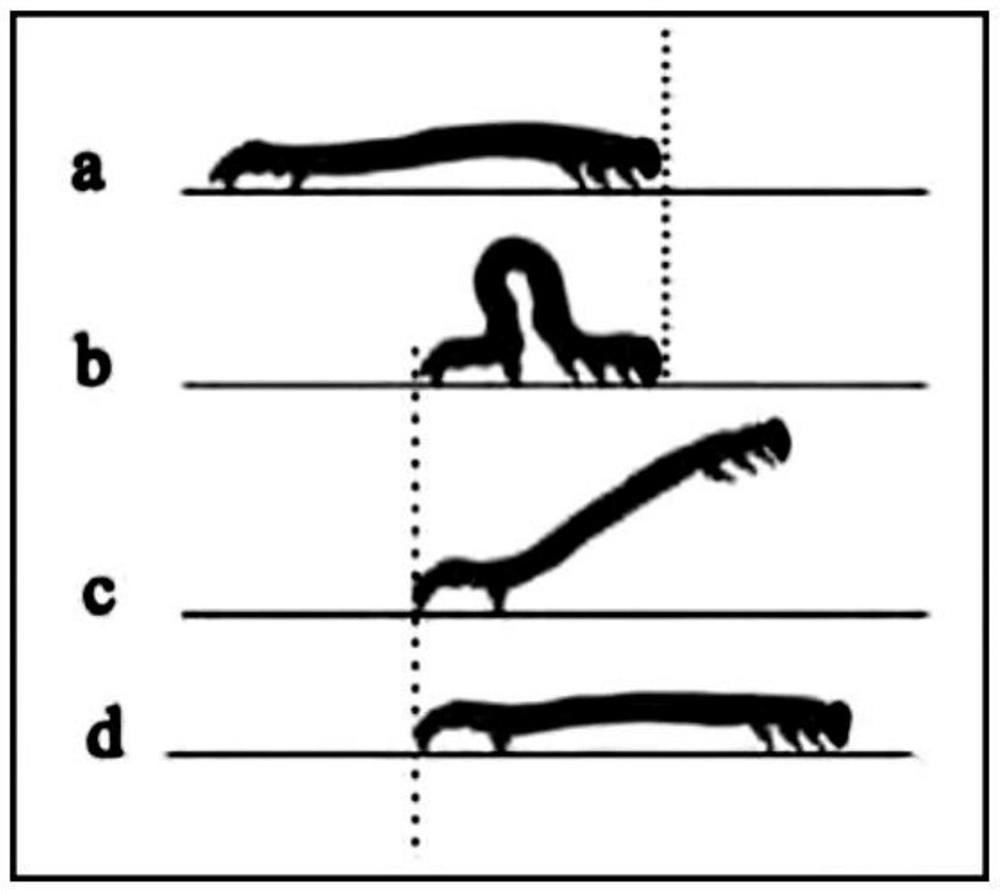
[0030] The present invention starts from the gait characteristics of simulating the crawling of inchworms and earthworms, and develops a bionic robot crawling in the pipeline. figure 1 shown.
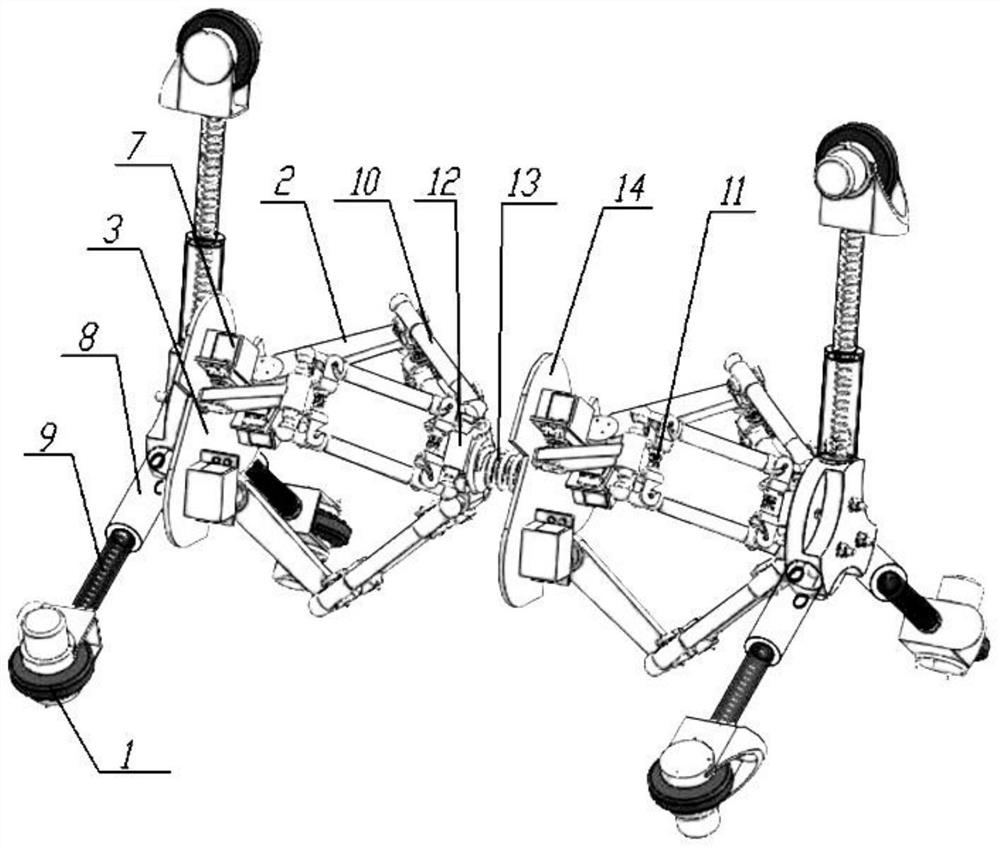
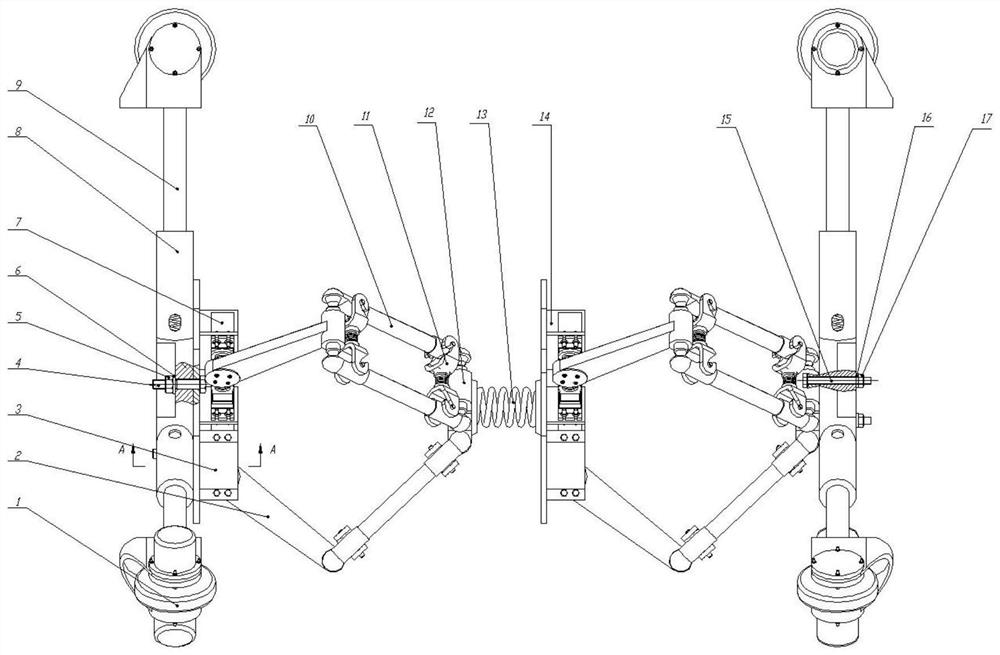
[0031] like figure 2 , image 3 As shown, the bioni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More