

Dynamic behavior decision-making method for autonomous vehicle in networked environment
A technology of automatic driving and decision-making method, which is applied in the direction of motor vehicles, vehicle position/route/altitude control, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0107] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
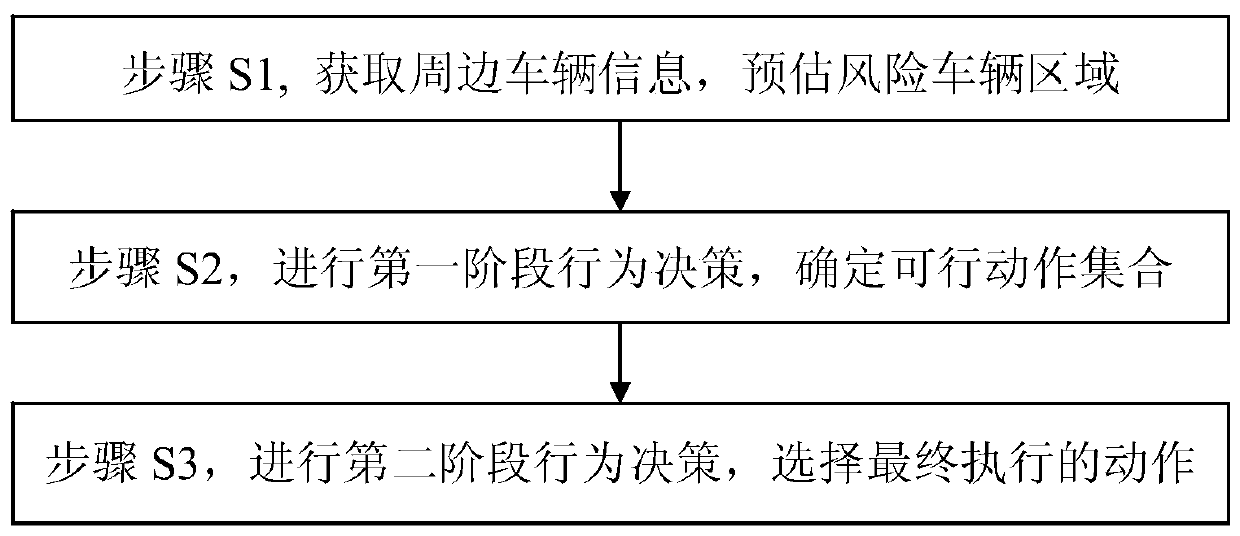
[0108] see figure 1 , a method for decision-making of dynamic behavior of an autonomous driving vehicle in a networked environment according to an embodiment of the present invention, the method includes the following steps S1-S3.
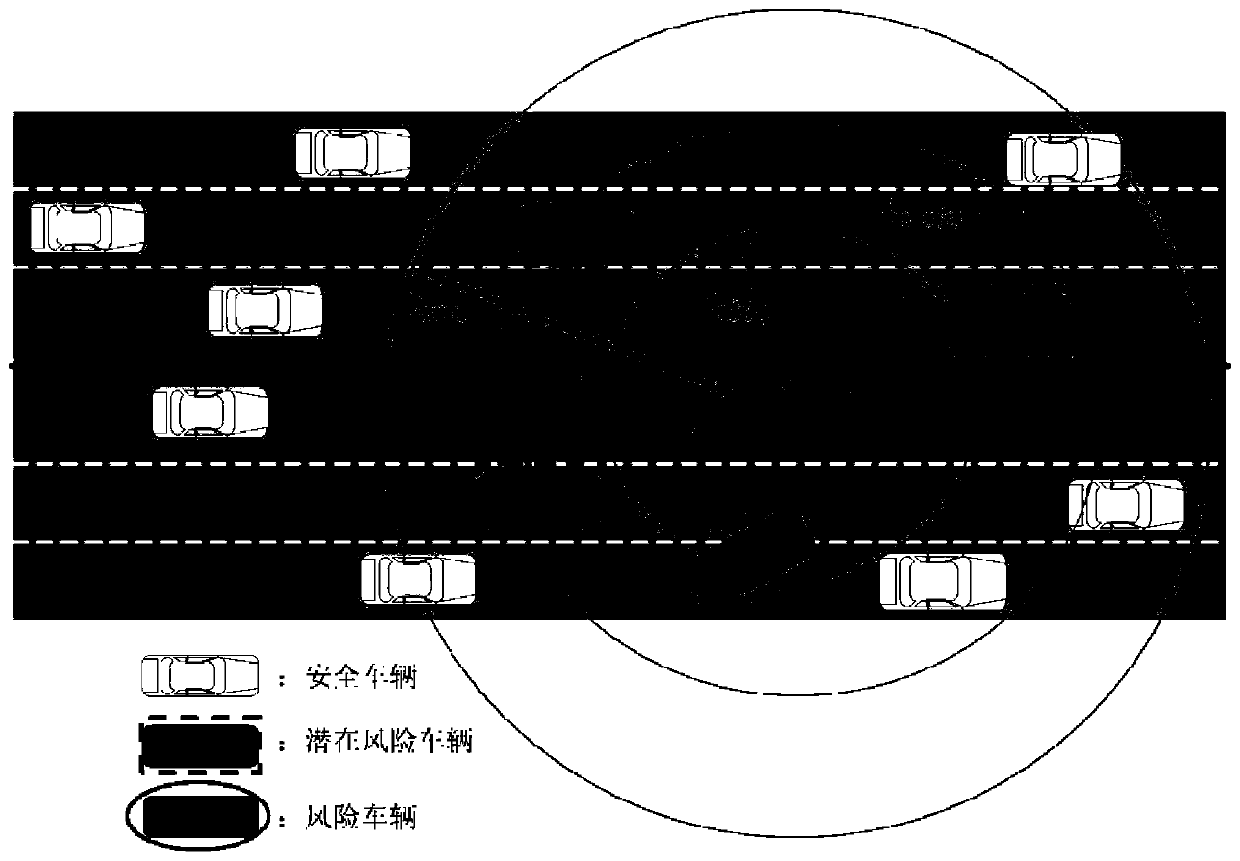
[0109] Step S1, when the self-vehicle is in the V2X network environment, the surrounding road users obtain the surrounding environment information; and take the center of mass of the self-vehicle as the center, divide the area with different radii, and estimate the risk area. The ego vehicle is an autonomous vehicle. The surrounding environment information includes, for example, the position and speed information of road users such as surrounding vehicles, cyclists, pedestrians and obstacles. The estimated risk area is equivalent to Figure 4 The preprocessing of the risk prediction link in the process determines the ris...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More