

Cabled remote operated vehicle seabed fixed-point landing motion control method based on SI control
An underwater robot, motion control technology, applied in electric controllers, controllers with specific characteristics, adaptive control, etc., can solve problems such as economic losses, underwater structure collisions and even accidents, poor fixed-point landing accuracy, etc. The effect of improving accuracy, improving fixed-point landing accuracy, and reducing the difficulty of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
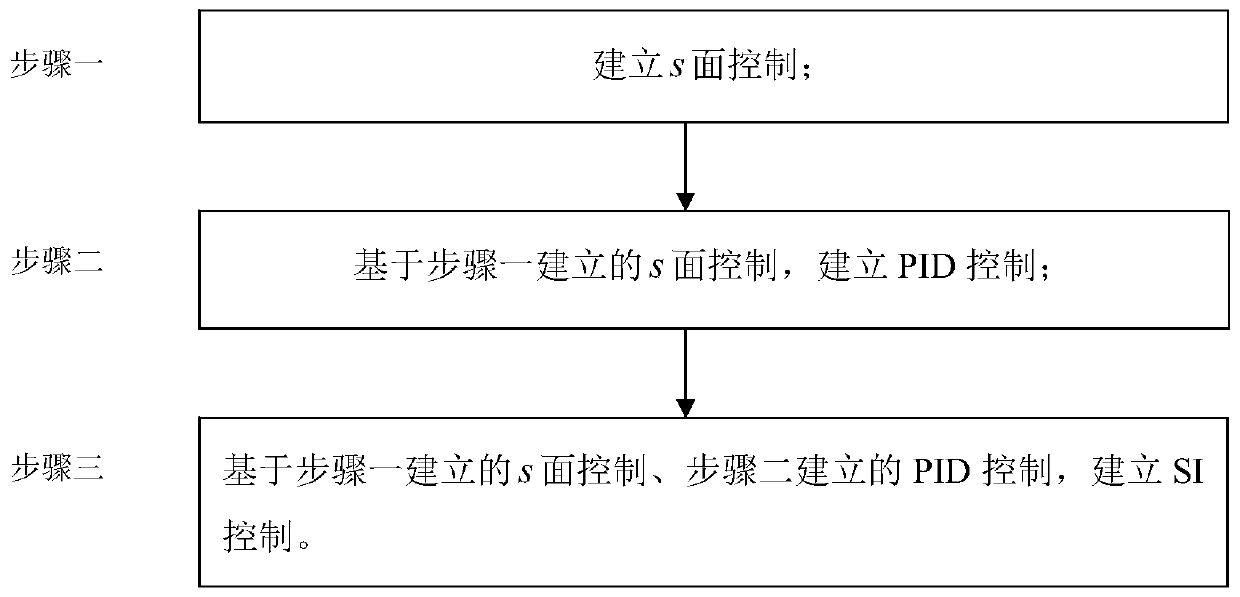
[0027] Specific implementation mode one: the specific process of the motion control method for the submarine fixed-point landing of the cabled underwater robot based on SI control in this embodiment is as follows:
[0028] (1) Definition of the coordinate system related to ROV research: Inertial coordinate system (E-ξηζ): the origin E can be selected at a certain point on the sea surface, the Eξ axis and Eη axis are placed in the horizontal plane and are perpendicular to each other, and the Eξ axis points to the true north. direction. Eζ is perpendicular to the Eξη plane, pointing to the center of the earth;
[0029] Motion coordinate system G-xyz: the origin G is taken at the center of gravity of the ROV, and the x-axis, y-axis and z-axis are respectively the intersection lines of the water plane, transverse section and middle longitudinal section passing through the origin;
[0030] (2) ROV modeling technology: based on Fossen's six-degree-of-freedom nonlinear ROV model [1]...
specific Embodiment approach 2
[0058] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the s-plane control based on step one is set up in the described step two, establishes PID control; The specific process is:
[0059] The PID control algorithm calculates the corresponding thrust according to the deviation of each quantity during the movement process. For position control, the basic requirement for the controller is to be able to control the submersible for various movements, such as obstacle avoidance and positioning. For the motion state, the requirement for the controller is to ensure that the submersible moves according to the expected speed or acceleration. For example, remote-controlled submersibles need two control methods. When the distance from the target point is far away, the submersible is required to move to the target point at a fixed speed, that is, PID control is performed according to the speed deviation; when the distance from the target poin...
specific Embodiment approach 3
[0064] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the s-plane control based on step 1 and the PID control established in step 2 in the described step 3 establish SI control; the specific process is:
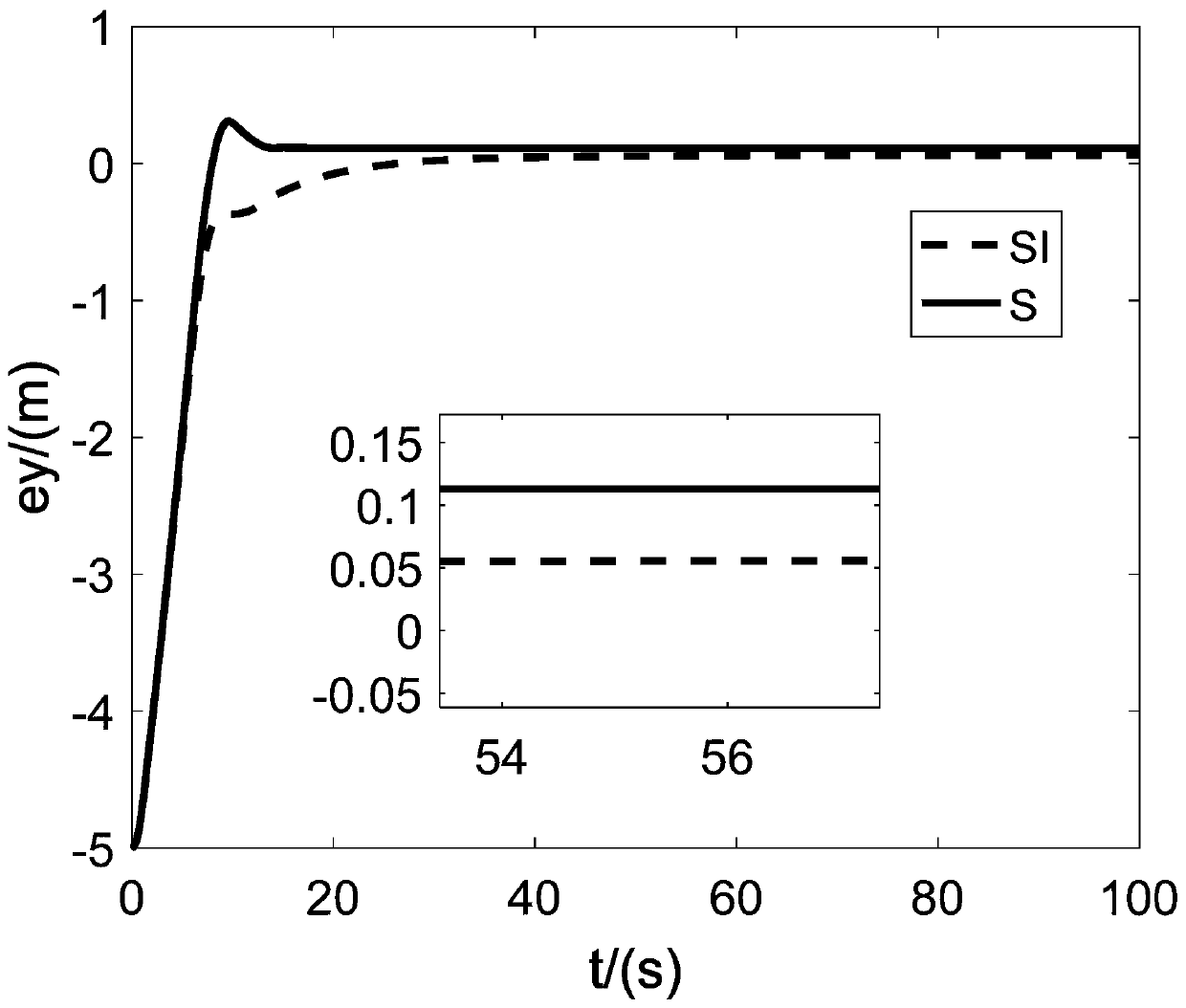
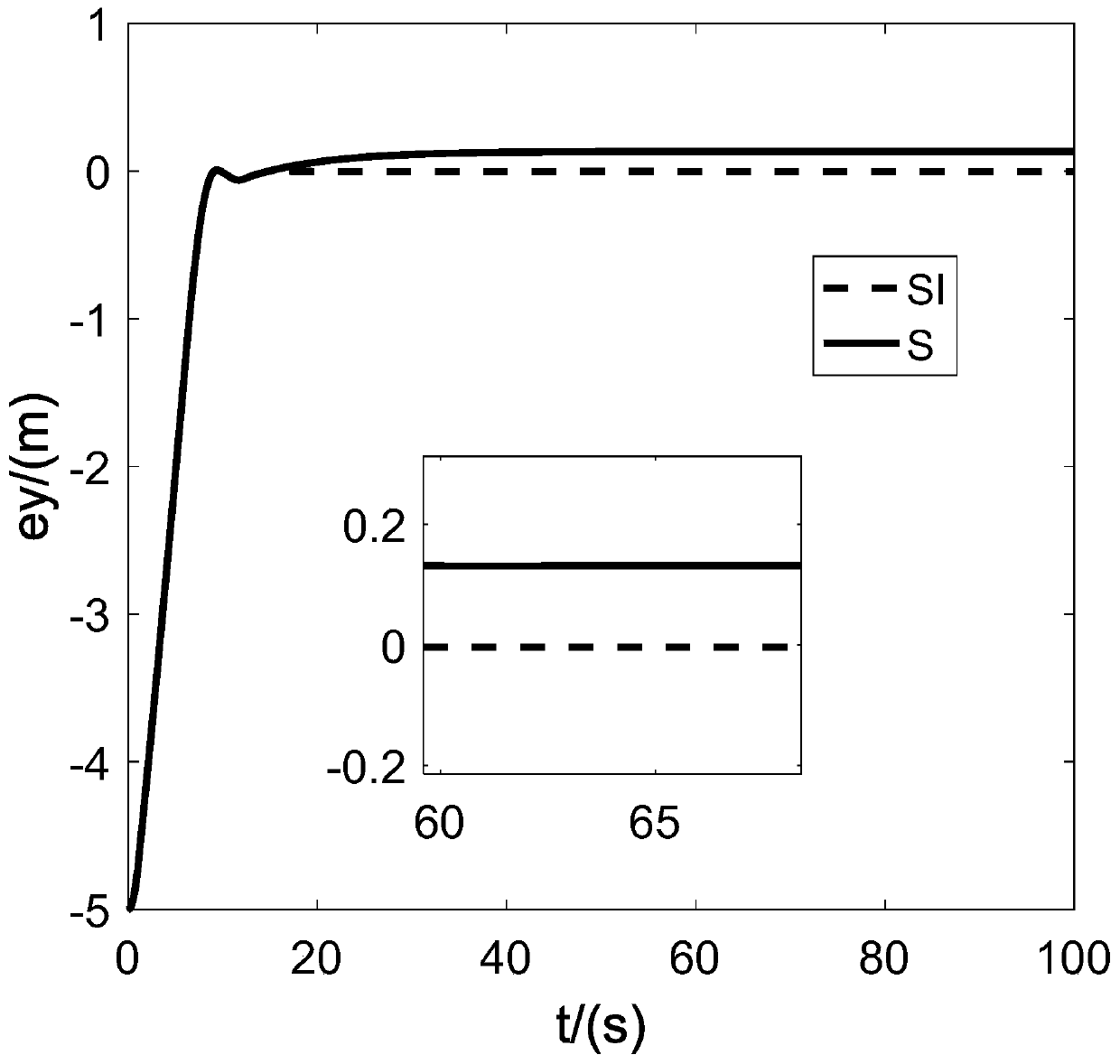
[0065] The s-plane control is favored by many researchers because of its few parameters and easy adjustment. With the deepening of research, the shortcomings of s-plane control are also reflected. When s-plane control deals with complex ocean environments such as ocean currents, there will be steady-state errors. In order to solve this problem, various methods of improvement have been tried. Among them, the method of adaptively estimating the s-plane parameters to eliminate the steady-state error is the most mature. However, the s-plane control method based on adaptive estimation parameters is relatively complicated, which increases the difficulty of practical application of this improved s-plane control method. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More