A multi-robot system equipment for in-situ machining of large complex components
A multi-robot and robot technology, applied in the direction of manipulators, manufacturing tools, other manufacturing equipment/tools, etc., can solve the problems of easy deformation of processing, difficult to guarantee accuracy, unstable process, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0050] Additional aspects and advantages of the invention will be set forth in the description which follows, and in part will be obvious from the description, or may be learned by practice of the invention.
[0051] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
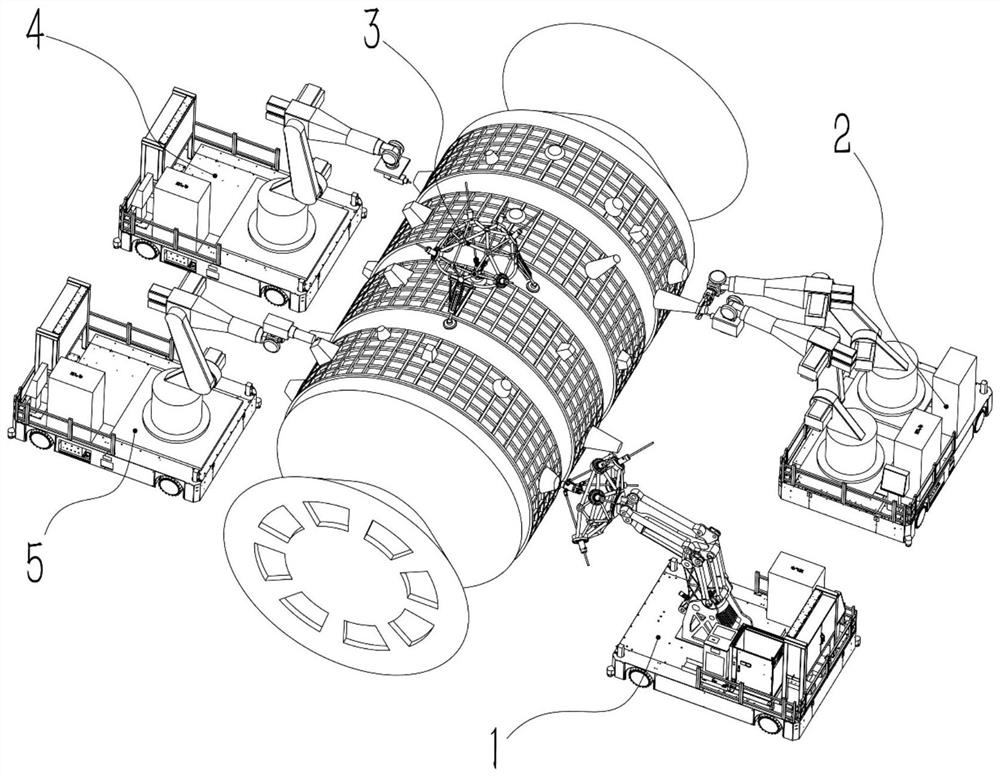
[0052] A multi-robot system equipment for in-situ processing of large and complex components proposed according to an embodiment of the invention will be described below with reference to the accompanying drawings.
[0053] Such as figure 1 As shown, the multi-robot system equipment for in-situ processing of large complex componen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More