

Three-legged platform driven by piezoelectric ceramic actuator and control method thereof
A piezoelectric actuator, piezoelectric ceramic technology, applied in the direction of piezoelectric effect/electrostrictive or magnetostrictive motors, generators/motors, electrical components, etc., can solve the problem of three-dimensional deflection, The problems of modular design and difficulty in operating the control platform are not realized, and the effect of clear and understandable input parameters, low cost and low technical threshold is achieved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
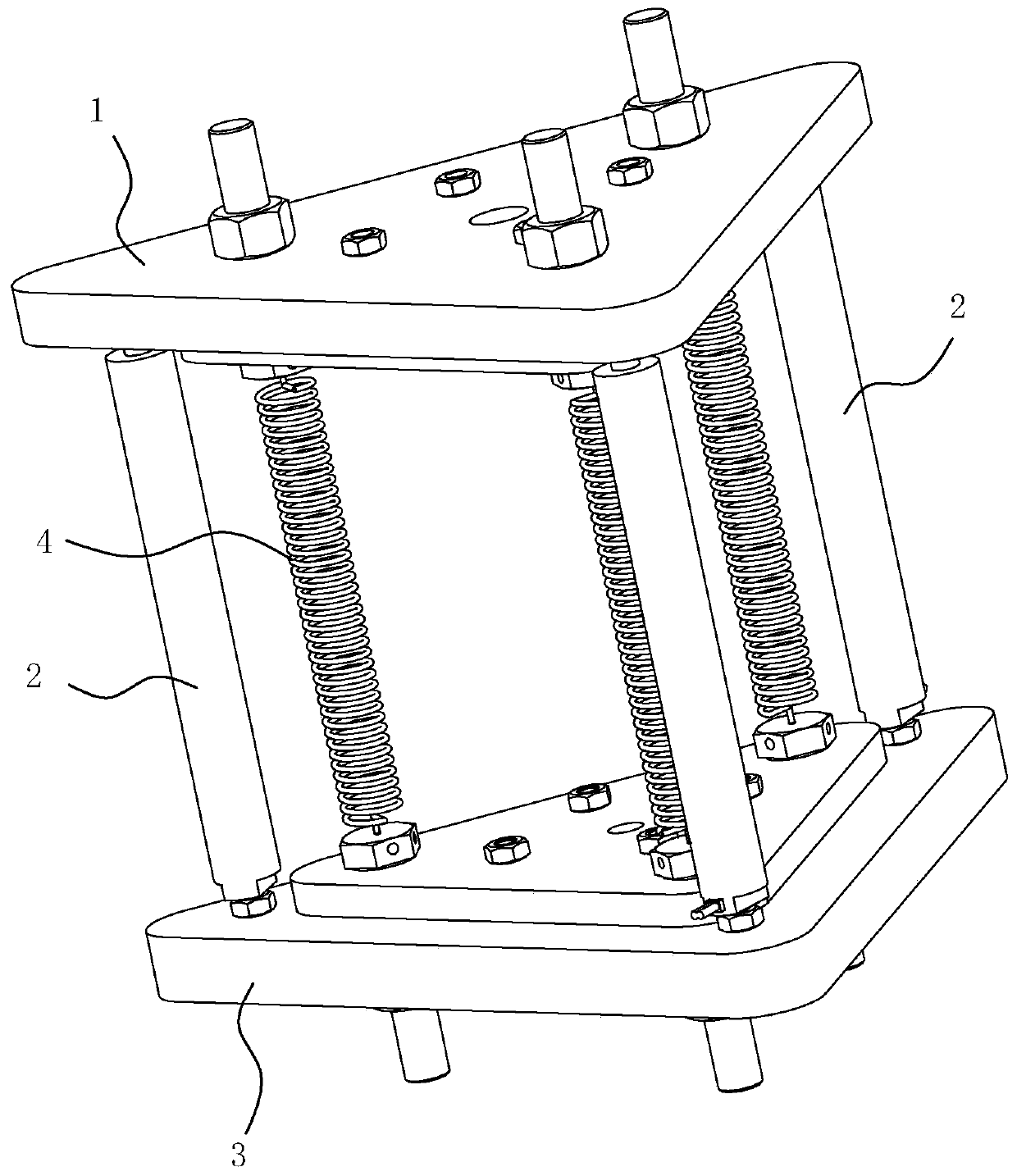
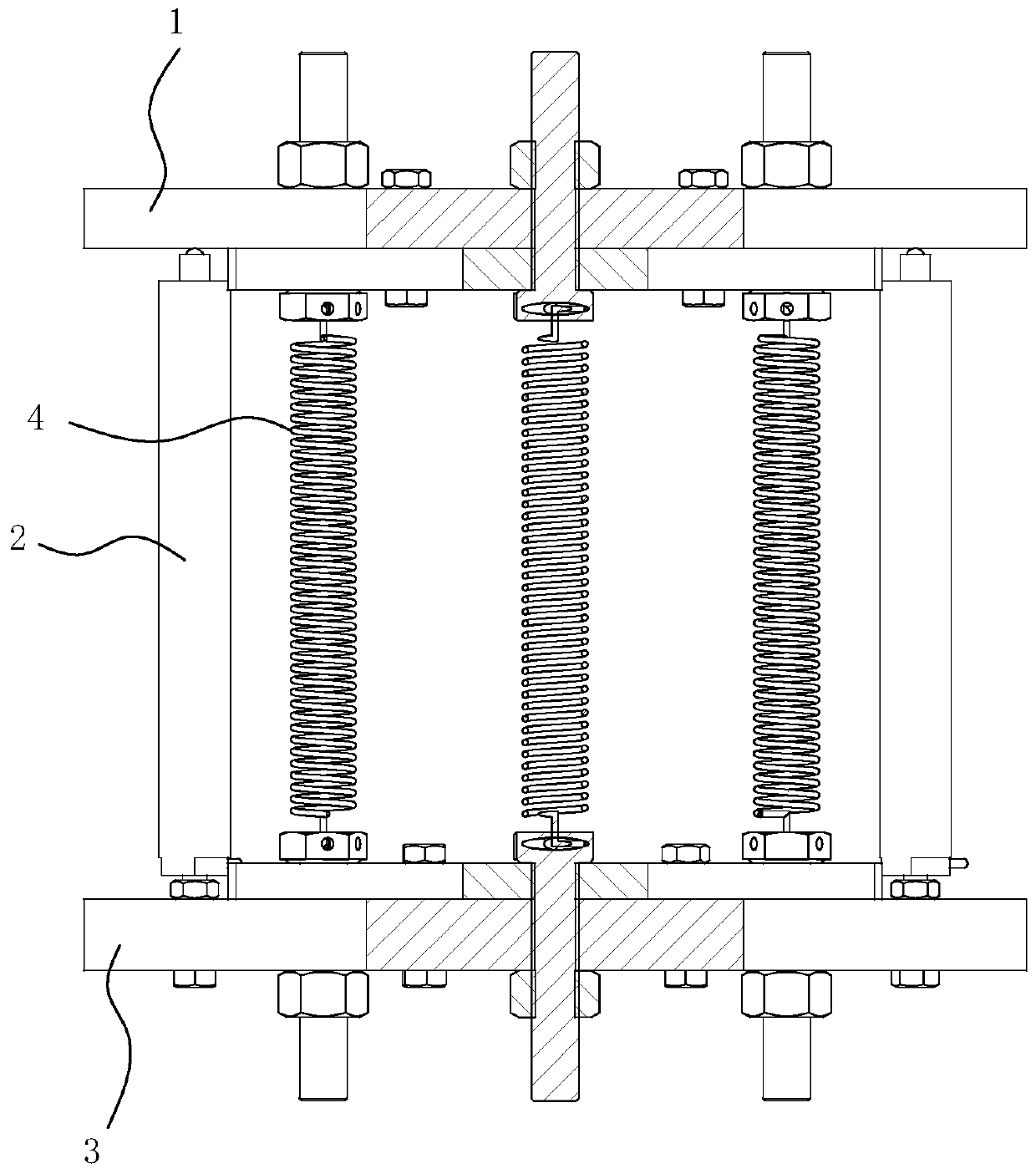
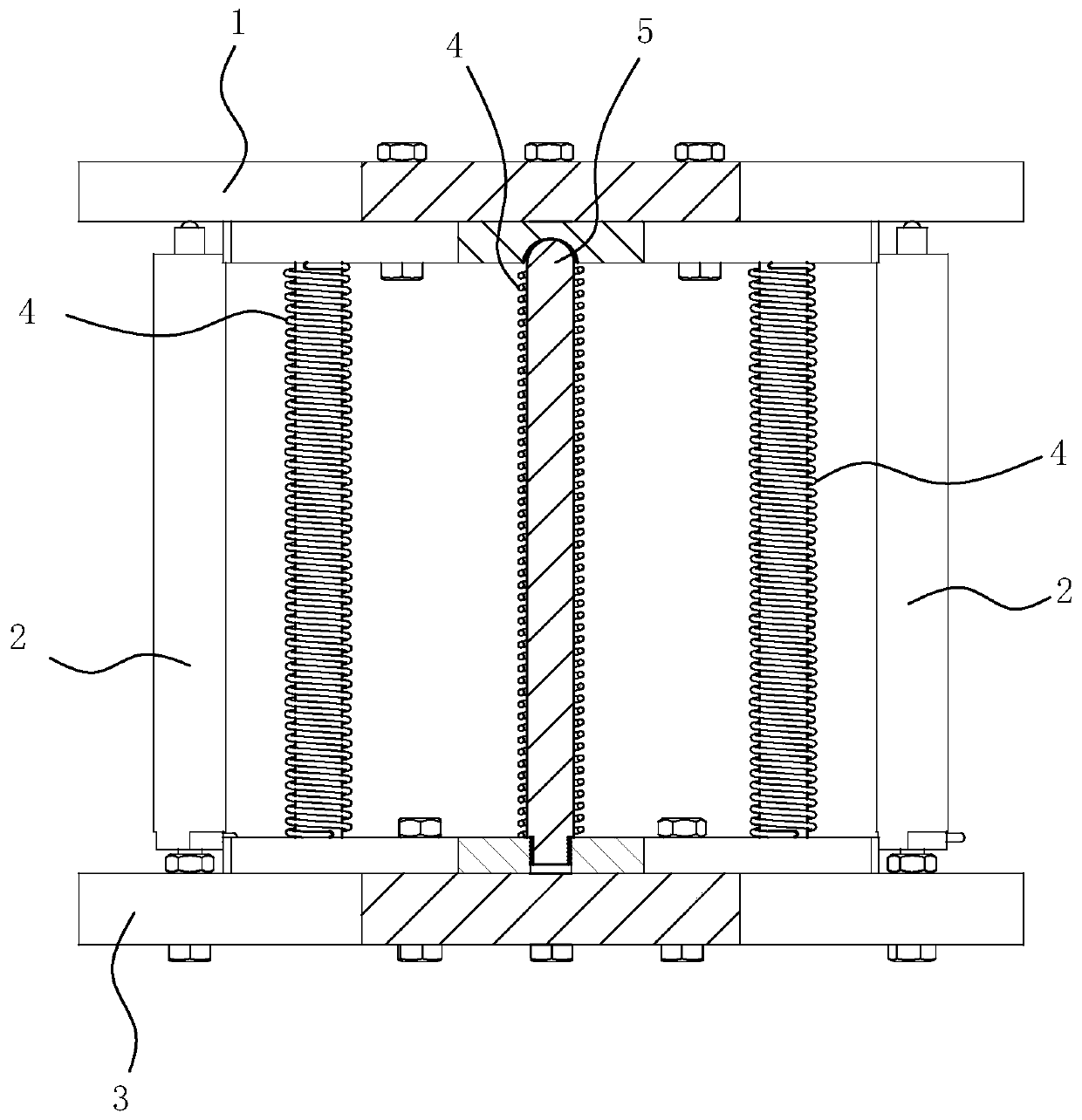
[0022] Such as Figure 1-2 As shown in , an embodiment of the present invention provides a piezoelectric ceramic actuator-driven tripod platform, which includes an upper plate 1, three piezoelectric actuators 2 and a lower plate 3, the piezoelectric actuator 2 is a piezoelectric ceramic actuator, the bottom end of the piezoelectric actuator 2 is fixed on the lower plate 3 by a threaded fastener, and the piezoelectric actuator 2 and the lower plate 3 The connection positions are distributed in a triangle, and the telescopic head at the top of the piezoelectric actuator 2 is connected to the bottom surface of the upper plate 1, and the connection position between the piezoelectric actuator 2 and the upper plate 1 is Triangular distribution. The piezoelectric actuator 2 controls the inclination angle of the upper plate 1 relative to the lower plate 3 through the rise and fall of the telescopic head, so as to achieve the purpose of fine-tuning the inclination angle of the upper p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More