Anti-collision device for a robot
An anti-collision device and robot technology, applied in the field of robots, can solve the problems of immature technology and weak ability of robots to simulate reality, and achieve the effect of strong ability and strong implementability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
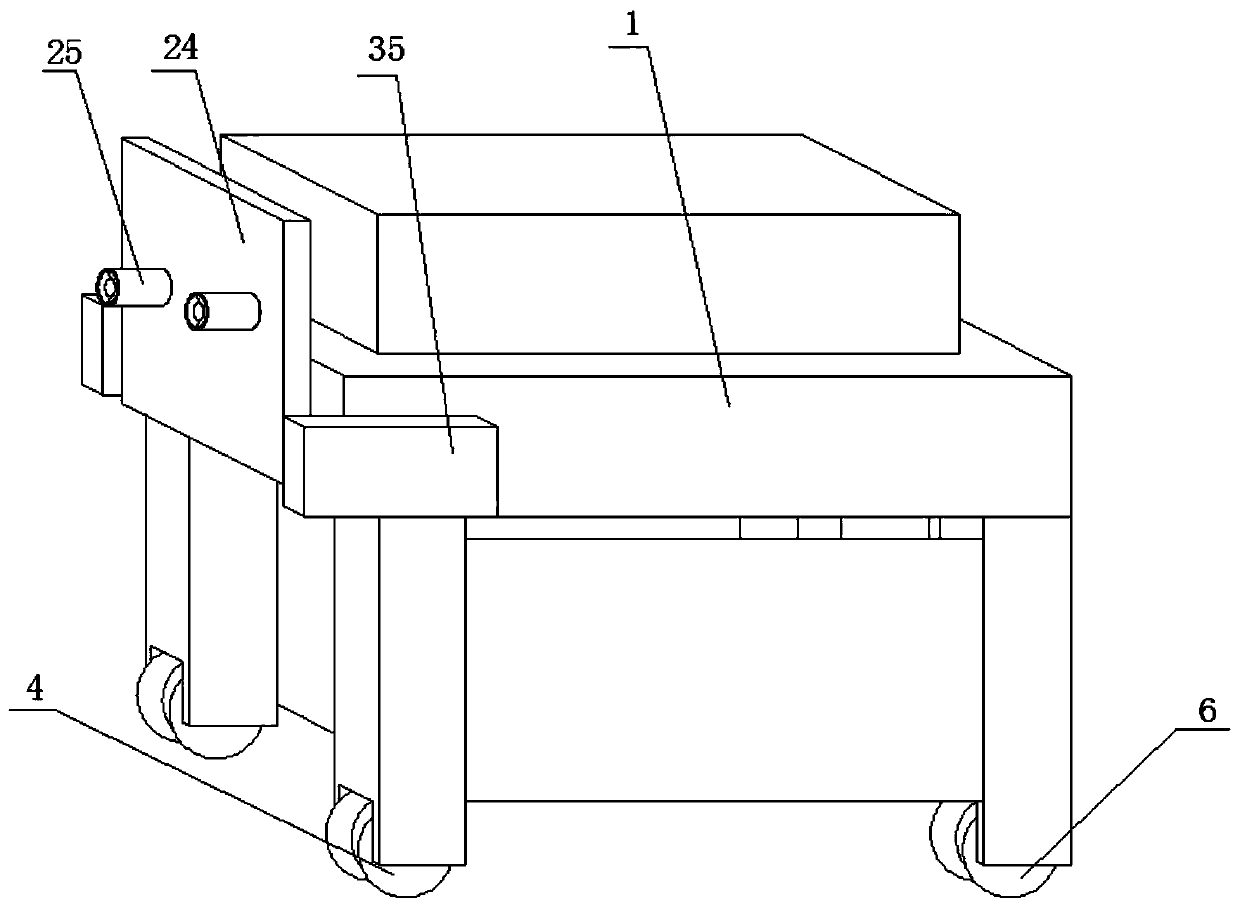
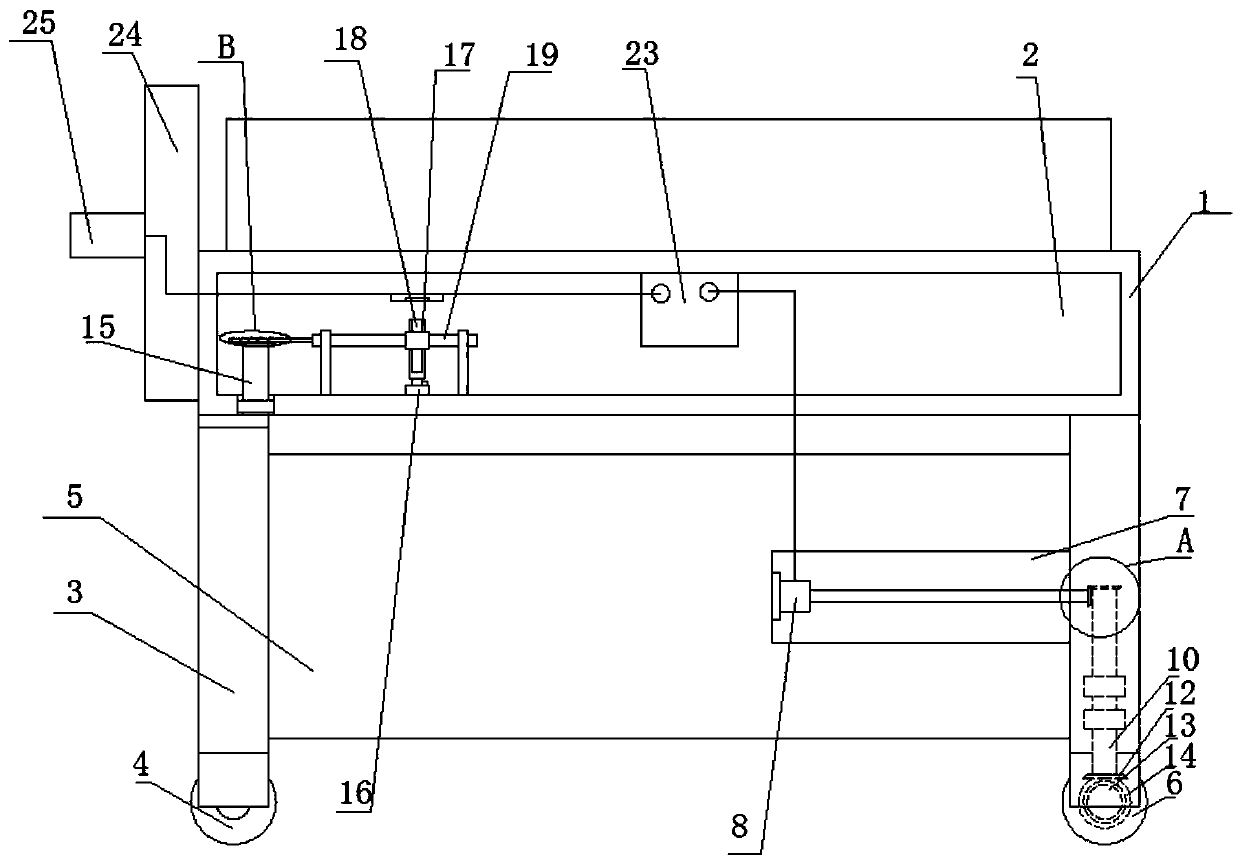
[0031] see Figure 1-6, this embodiment provides a robot anti-collision device, including a control block 1, a chamber 2 is arranged on the control block 1, four vertical rods 3 are mounted on the bottom of the control block 1, and two vertical rods on the same side The bottom of 3 is respectively provided with two steering wheels 4 and two driving wheels 6, and the side of four vertical rods 3 close to each other is fixedly installed with the same installation block 5, is provided with driving mechanism on the installation block 5, and two driving wheels 6 The side close to each other is provided with the same drive shaft 13, the drive shaft 13 is connected to the drive mechanism in transmission, and the tops of the two vertical rods 3 on the same side are fixedly installed with the steering shaft 15, and the top of the steering shaft 15 runs through the control block 1 and extends into the chamber 2, the interior of the chamber 2 is provided with a steering mechanism, and th...
Embodiment 2
[0035] see Figure 1-6 , further improvements have been made on the basis of Example 1:
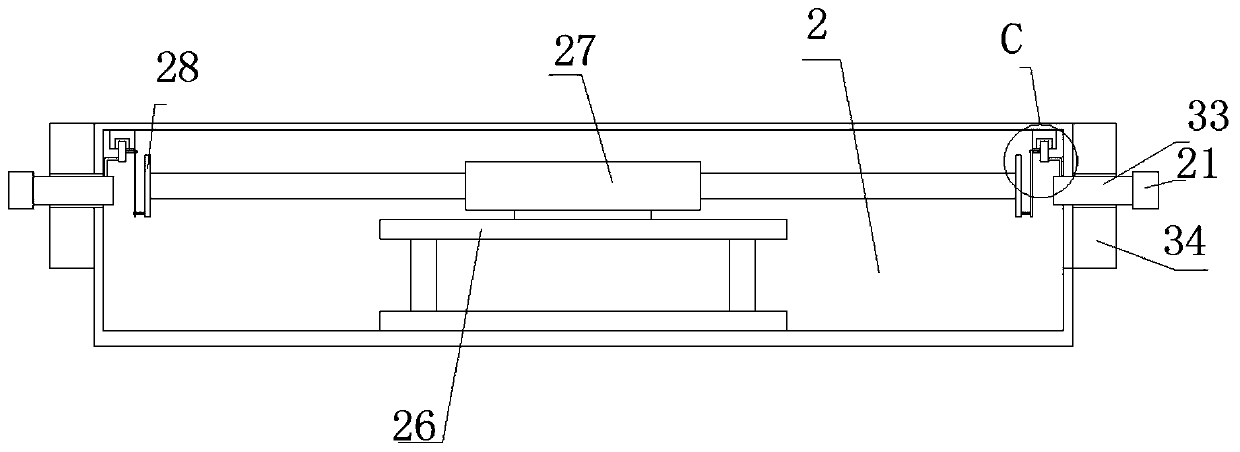
[0036] The sliding mechanism includes a cross bar 26 fixedly installed on the inner wall of the bottom of the chamber 2, a biaxial motor 27 is fixedly installed on the top of the cross bar 26, and a turntable 28 is fixedly installed on both output shafts of the biaxial motor 27, and the chamber 2 Two sliders 31 symmetrically arranged are slidably installed on the inner wall of the top of the top, and the two sliders 31 are respectively connected to the side of the two turntables 28 away from each other. The sides of the two sliders 31 away from each other are fixedly installed with L Shaped rods, the bottoms of the two L-shaped rods are fixedly connected to the tops of the two vertical bars 34 respectively, which can collect data on the obstacle situation at the steering position to avoid collisions;
[0037] An electric push rod 16 is fixedly installed on the bottom inner wall of the ch...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap