

Method and device for planning drone cluster operation
A technology of unmanned aerial vehicle and planning scheme, applied in the field of unmanned aerial vehicle, it can solve the problem of difficulty in maximizing operation income, and achieve the effect of maximizing operation income
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
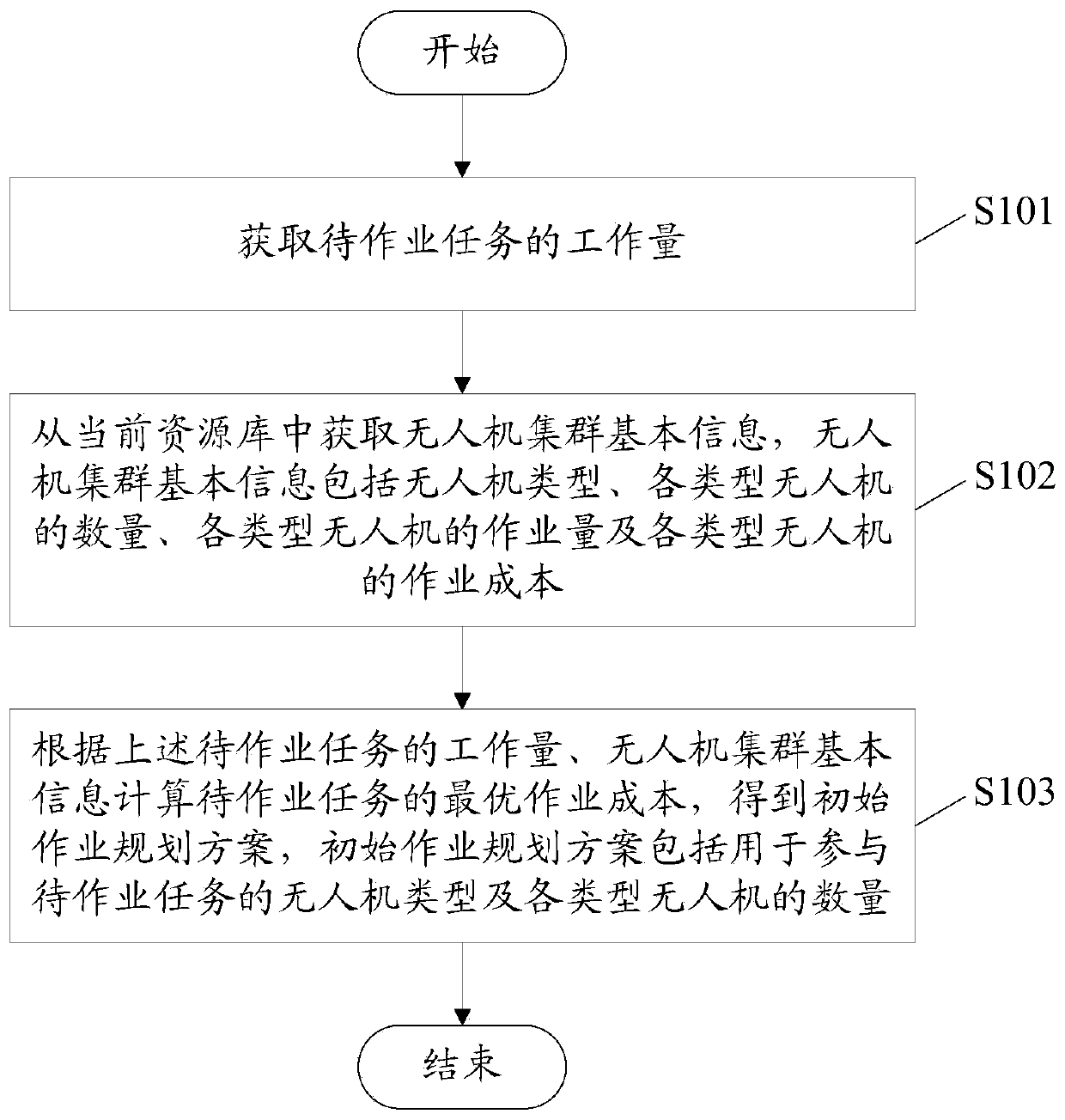
[0063] see figure 1 , figure 1 It is a schematic flowchart of the UAV cluster operation planning method provided by the embodiment of the present application.
[0064] The unmanned aerial vehicle cluster operation planning method of the embodiment of the present application includes the following steps:
[0065] Step S101, acquiring the workload of tasks to be performed.
[0066] In this embodiment, the workload of the task to be performed may be the working time of the task to be performed or the like.
[0067] The workload of the task to be performed may be input by the relevant staff on the server, or may be input by the relevant staff on the user terminal and transmitted to the server.
[0068] In this embodiment, the workload of the pending job task is S.
[0069] Step S102, obtain the basic information of the UAV cluster from the current resource library. The basic information of the UAV cluster includes the type of UAV, the number of each type of UAV, the workload o...
Embodiment 2
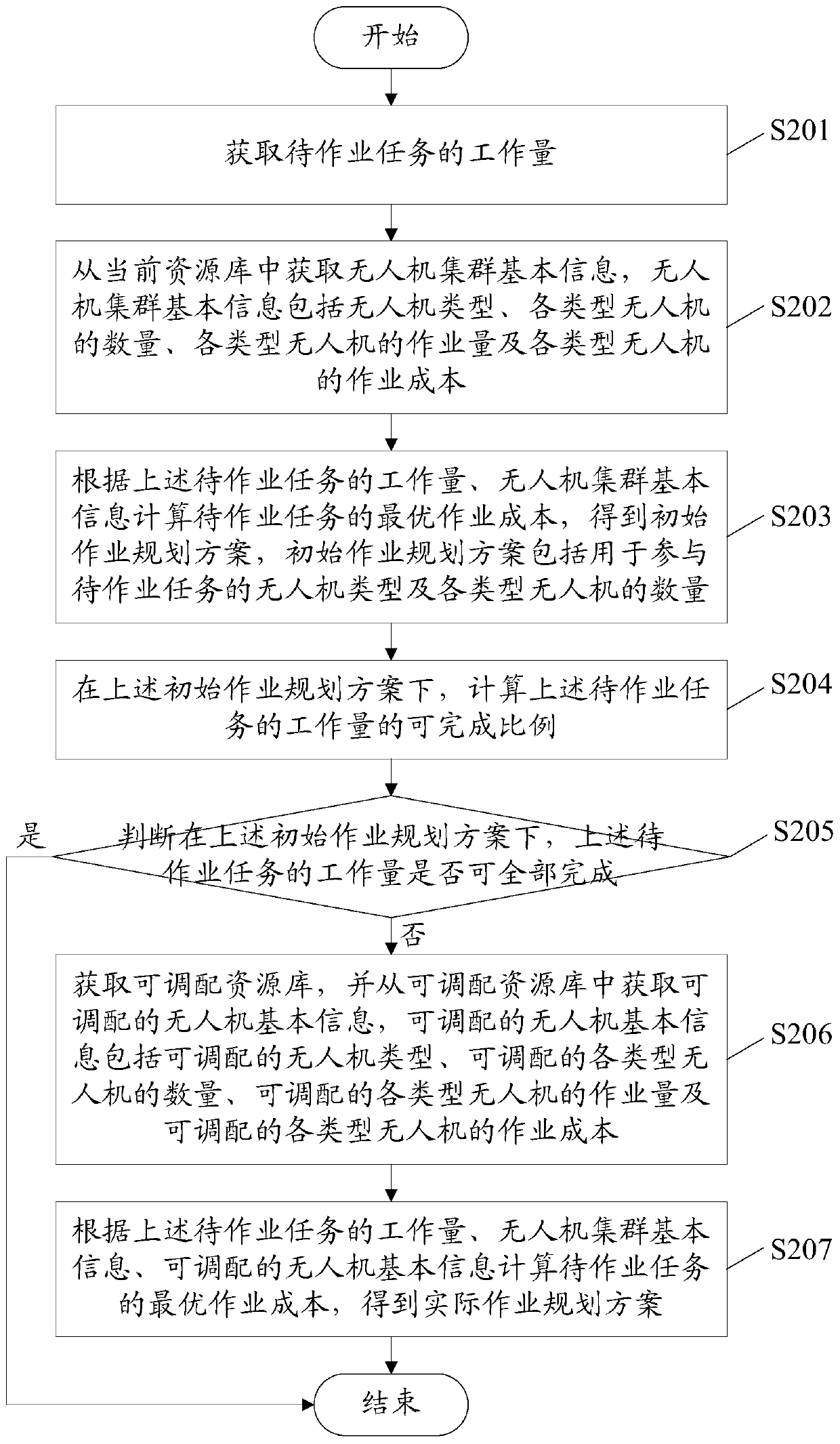
[0093] see figure 2 , figure 2 It is a schematic flowchart of the UAV cluster operation planning method provided by the embodiment of the present application.
[0094] The unmanned aerial vehicle cluster operation planning method of the embodiment of the present application includes the following steps:
[0095] Step S201, acquiring the workload of tasks to be performed.
[0096] Step S202, obtain the basic information of the drone cluster from the current resource library, the basic information of the drone cluster includes the type of drone, the number of each type of drone, the workload of each type of drone, and the amount of each type of drone operating costs.
[0097] Step S203, calculate the optimal operation cost of the task to be operated according to the workload of the task to be operated and the basic information of the UAV cluster, and obtain the initial operation planning scheme, which includes the types of UAVs used to participate in the task to be operated...
Embodiment 3
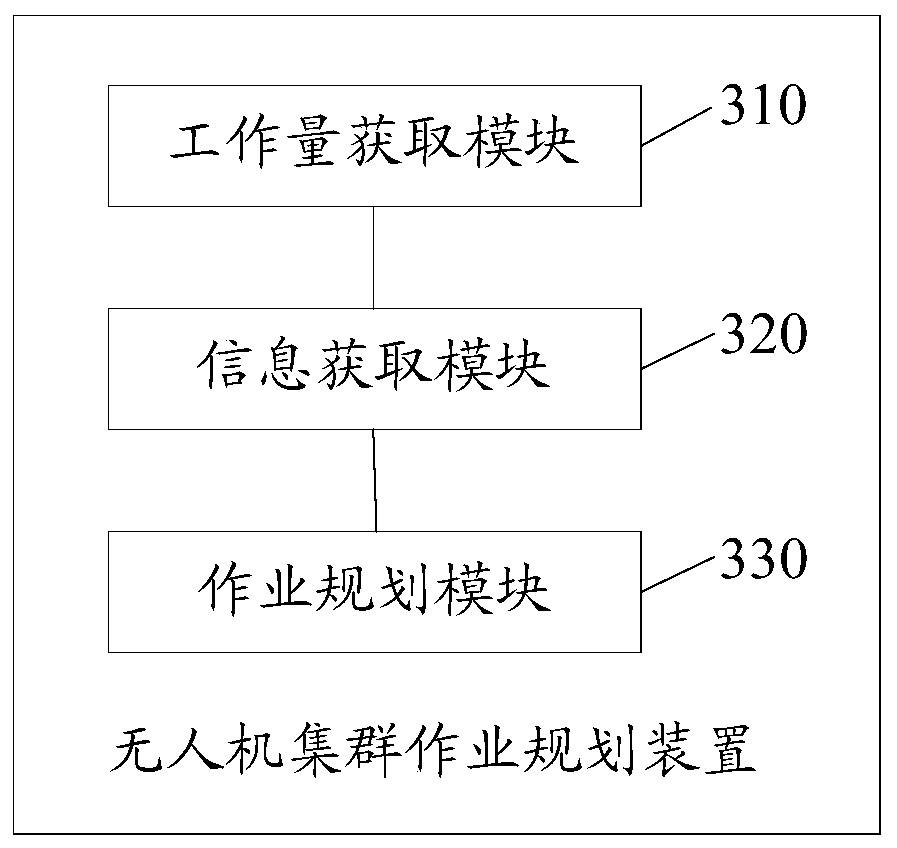
[0124] see image 3 , image 3 It is a schematic structural diagram of the UAV cluster operation planning device provided by the embodiment of this application.
[0125] The unmanned aerial vehicle cluster operation planning device of the embodiment of the present application includes:
[0126] The workload acquisition module 310 is configured to acquire the workload of tasks to be performed.
[0127] In this embodiment, the workload of the task to be performed may be the working time of the task to be performed or the like.
[0128] The workload of the task to be performed may be input by the relevant staff on the server, or may be input by the relevant staff on the user terminal and transmitted to the server.
[0129] The information acquisition module 320 is used to obtain the basic information of the UAV cluster from the current resource library. The basic information of the UAV cluster includes the type of the UAV, the number of each type of UAV, the workload of each t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More