

Submarine observation underwater robot based on trinocular vision and control method thereof
An underwater robot, seabed observation technology, applied in the direction of adaptive control, underwater operation equipment, general control system, etc. It can reduce the difficulty of underwater operation, reduce the cost of operation and maintenance, and improve the stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be specifically described below in conjunction with the accompanying drawings.
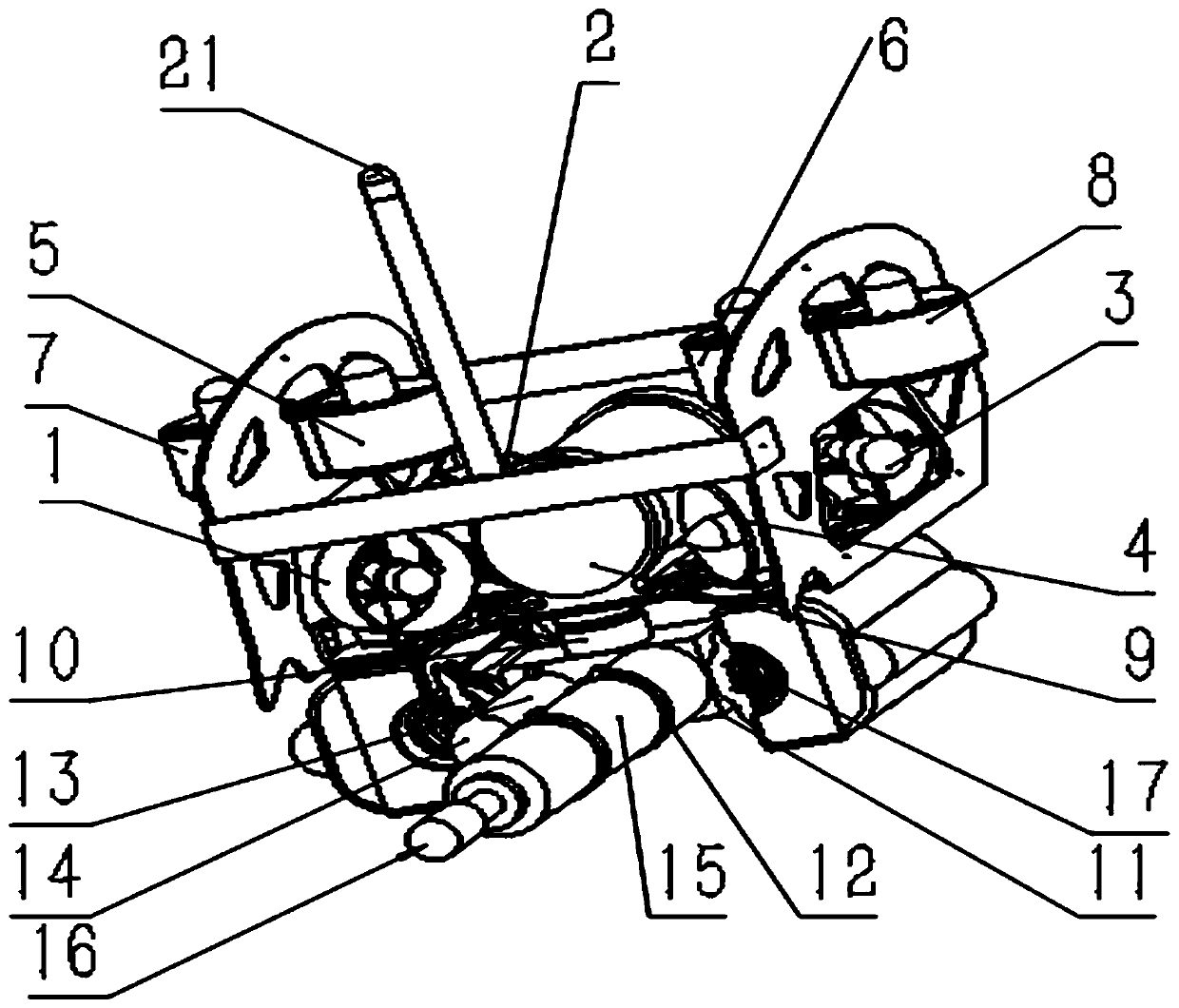
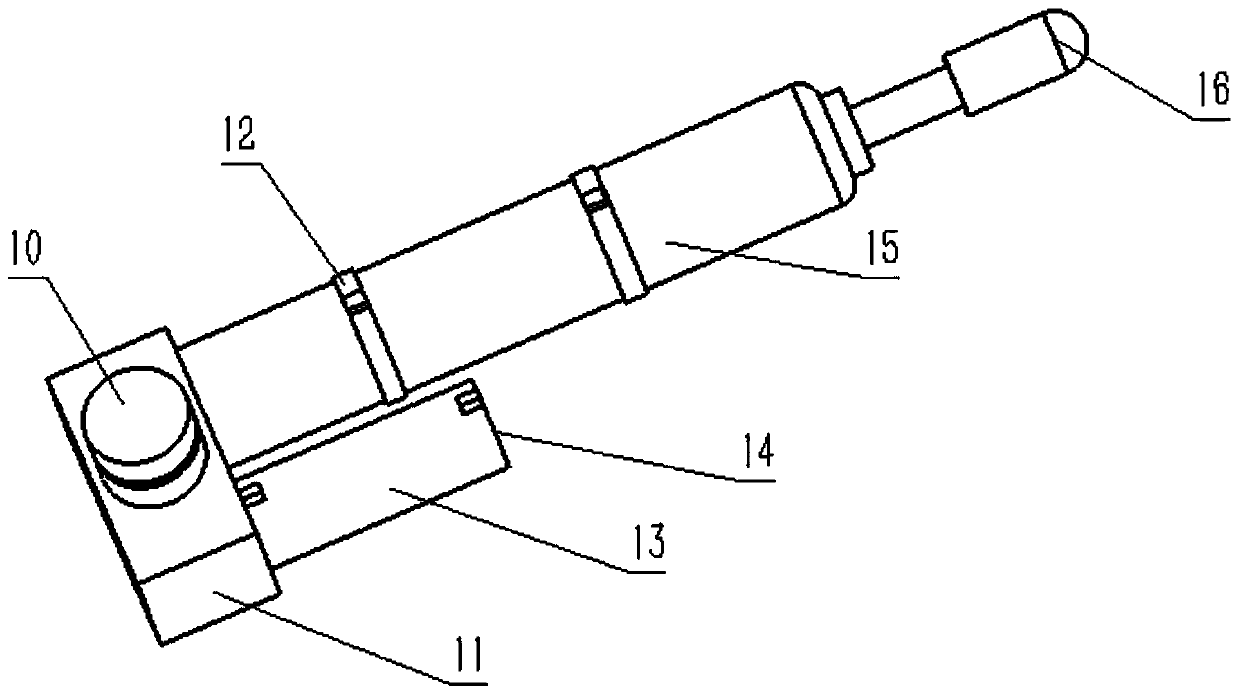
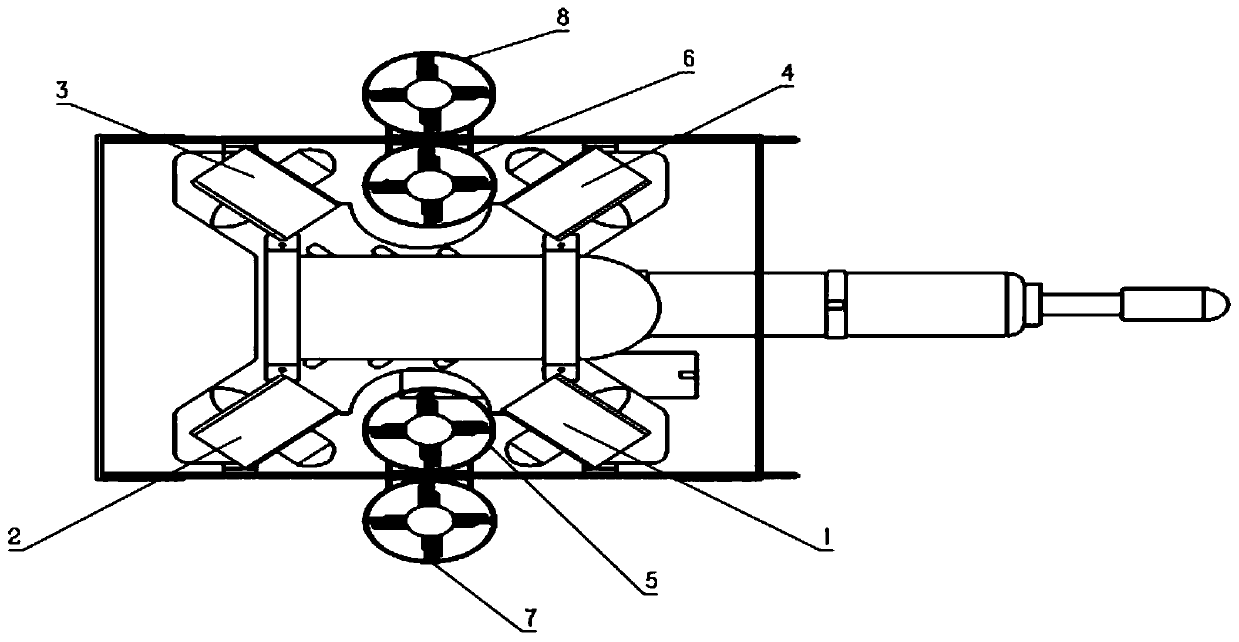
[0045] as attached figure 1 with attached figure 2 Shown, a kind of submarine observation underwater robot based on trinocular vision comprises a housing and a drive unit located on the housing; it is characterized in that: it also includes a vision acquisition unit and an airbag device; the vision acquisition unit includes Miniature camera, cylindrical electric push rod and cloud platform 10; Wherein micro camera is installed on the end of push rod; Described cloud platform device is connected with the base plate rotation of housing; Described cloud platform is fixedly connected with electric push rod; Described airbag There are two devices, which are located side by side at the left and right ends of the push rod respectively; when the air bag in the air bag device is opened, the electric push rod is between the two air bags and is juxtaposed with the two air ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More