Combined tetrahedral movable robot
A mobile robot and tetrahedron technology, applied in the fields of detection, reconnaissance, and carrying, can solve the problems of single moving gait, rolling gait and strong ground impact, etc., and achieve the effect of easy folding and storage, easy processing and manufacturing, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in further detail below in conjunction with the accompanying drawings.
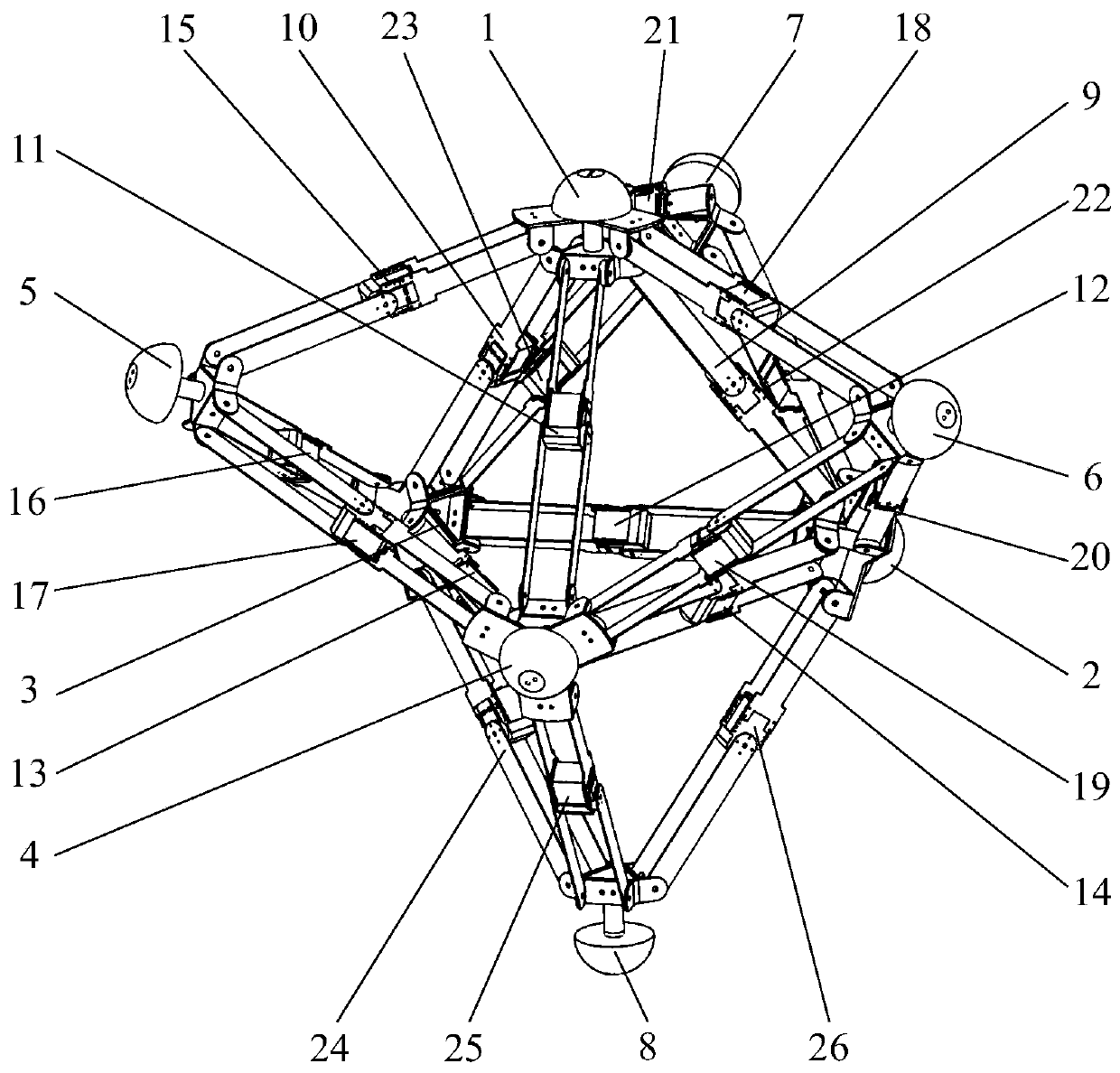
[0035] A combined tetrahedral mobile robot, such as figure 1 As shown, it includes the first to fourth six-pointed vertices (1, 2, 3, 4), the first to fourth three-pointed points (5, 6, 7, 8), the first to eighteenth branches (9 , 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26).
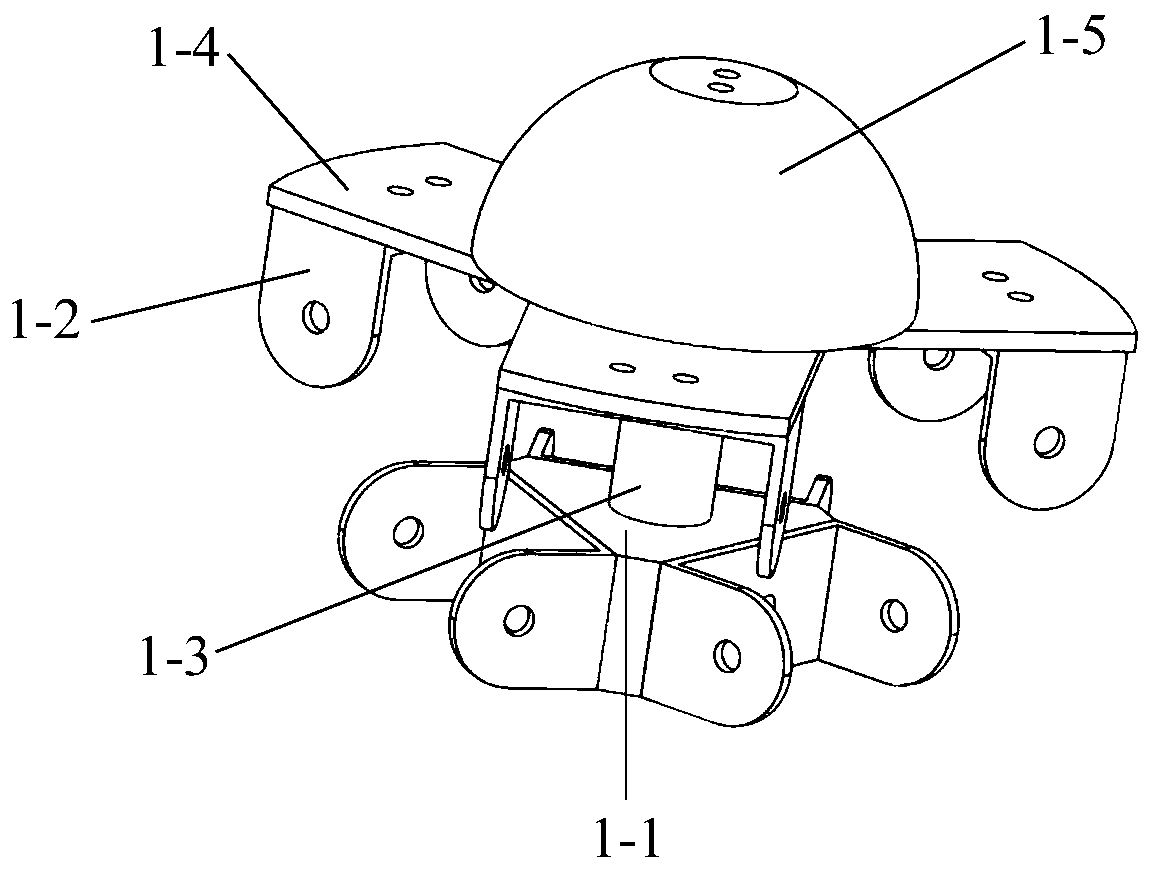
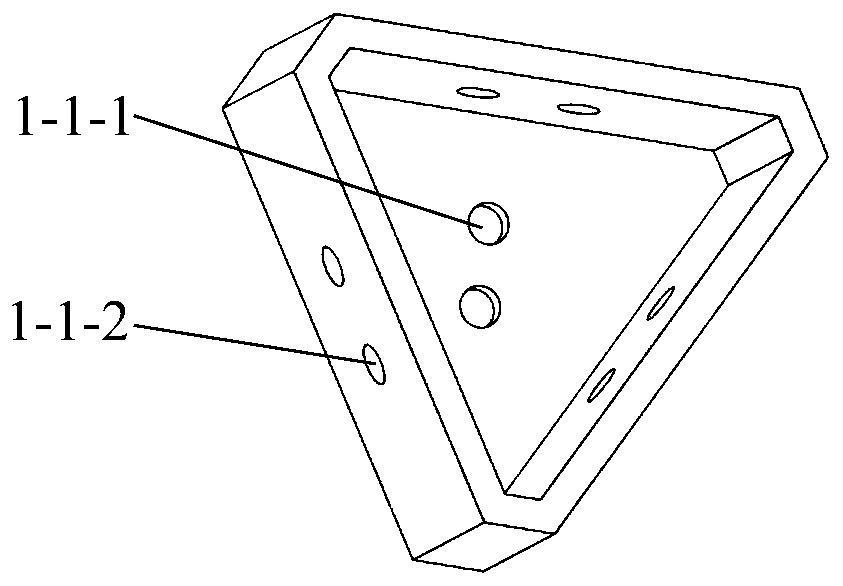
[0036] The first six-pronged vertex (1), such as figure 2 As shown, it consists of a triangular platform (1-1), six U-shaped plates (1-2), a support column (1-3), a trident plate (1-4) and a hemispherical apex (1-5); the second Up to the fourth hexapex (2, 3, 4) has exactly the same structure and dimensions as the first hexapex (1).
[0037] The first trident vertex (5), such as Figure 8 As shown, it consists of a bottom triangular platform (5-1), three bottom U-shaped plates (5-2), a long support cylinder (5-3), a short support cylinder (5-4) and a single ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com