Intelligent universal unmanned platform path planning method
A path planning, unmanned platform technology, applied in vehicle position/route/altitude control, non-electric variable control, instruments, etc., can solve the problem of slow path planning, not considering platform travel time, not considering intelligent general unmanned Platform energy consumption and other issues, to achieve the effect of effective path planning and optimal path planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The technical solution of the present invention is further described below, but the scope of protection is not limited.
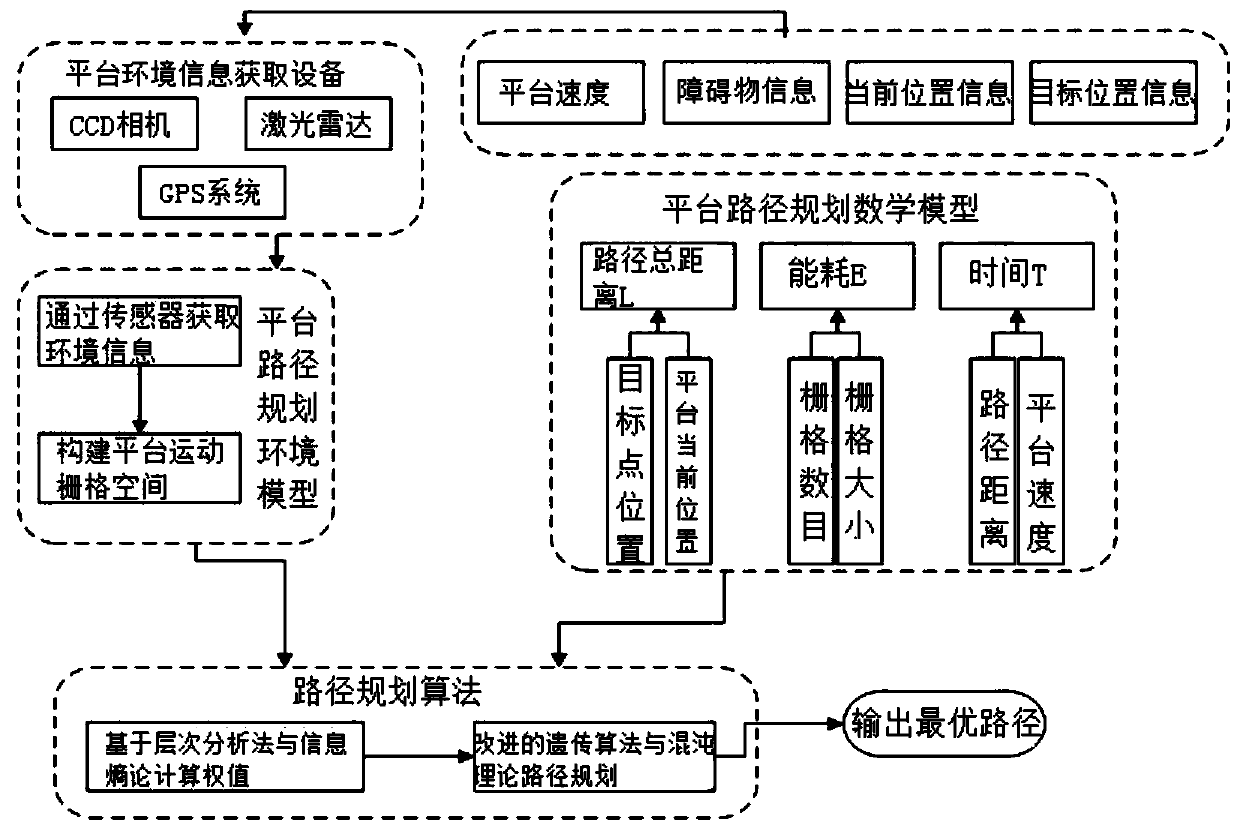
[0072] Such as figure 1 As shown, an intelligent general unmanned platform path planning method includes the following steps:
[0073] S1. Obtain the current position of the intelligent universal unmanned platform, the position of the target point, obstacles, impassable areas, and the current platform speed through the platform environment information acquisition equipment;
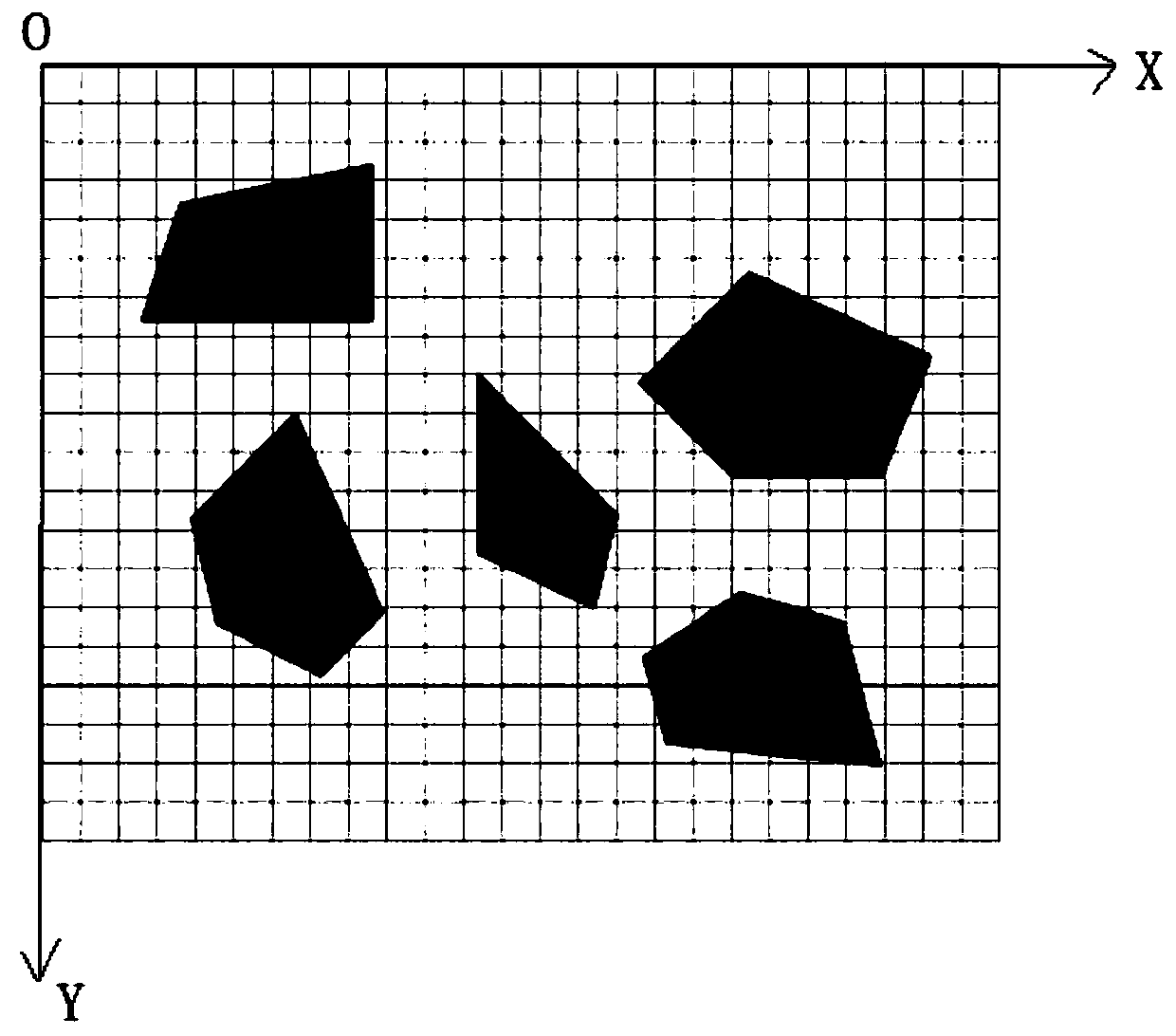
[0074] S2. Establish a platform path planning environment model according to the information obtained in step S1;
[0075] S3. Establish a platform path planning mathematical model according to the platform path planning environment model in step S2;
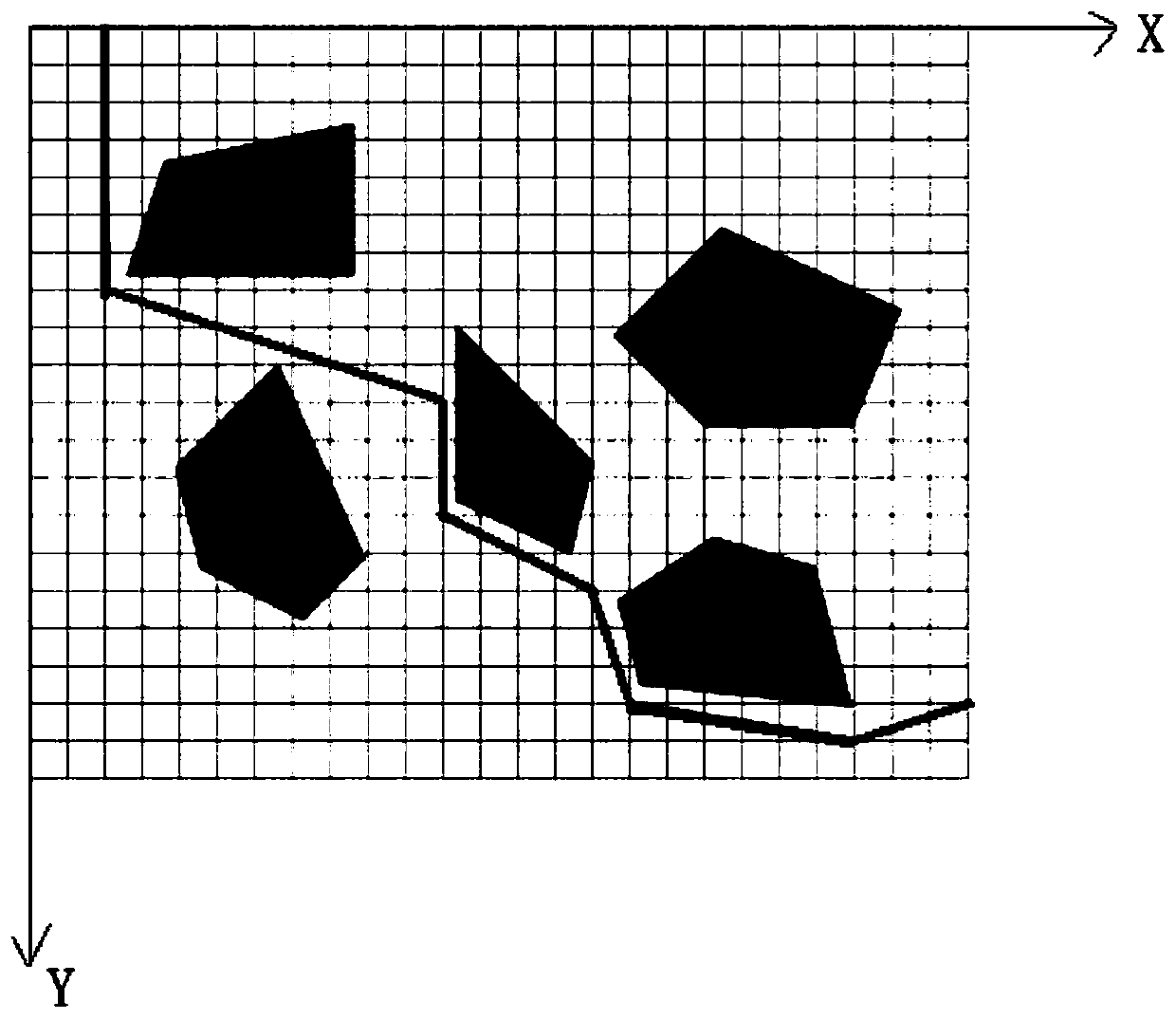
[0076] S4. Calculate the optimal path by combining the path planning algorithm with the environment model of the platform path planning and the mathematical model of the platform path planning.
[0077] Such as figure 2 As sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More