

Monocular vision inertia odometer system and monocular vision inertia odometer method
A monocular vision and odometer technology, applied in computing, computer parts, measuring distance, etc., can solve the problems of low positioning accuracy and poor real-time performance, and achieve the requirements of improving real-time performance, reducing processor performance, and improving adaptability and the effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and together with the embodiments of the present invention are used to explain the principle of the present invention and are not intended to limit the scope of the present invention.
[0039] System embodiment:
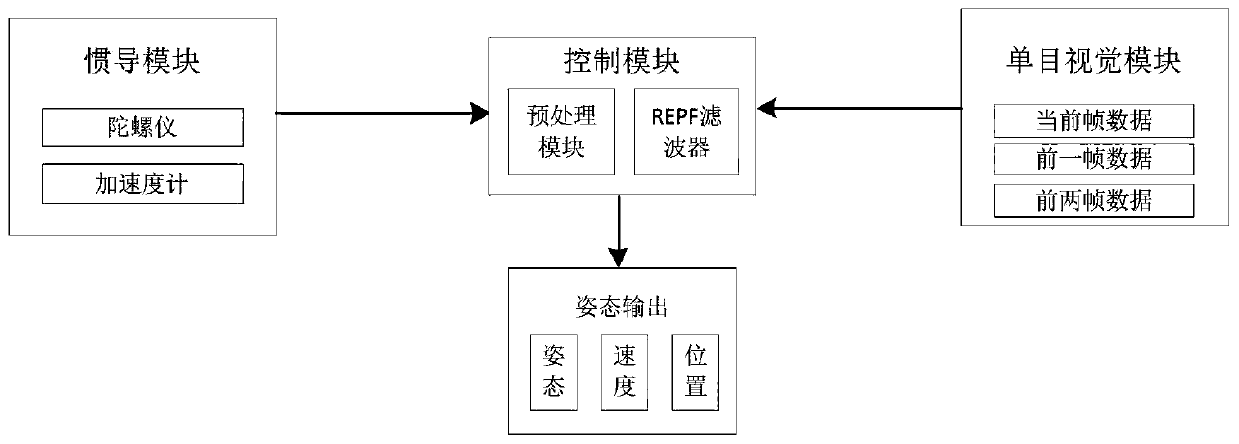
[0040] A specific embodiment of the present invention discloses a monocular visual inertial odometer system. Such as figure 1 As shown, it includes: inertial navigation module, monocular vision module, control module and attitude output module. The inertial navigation module is used to sense and measure the motion information of the carrier; the monocular vision module is used to obtain the surrounding environment information of the carrier through image frames; the control module includes a preprocessing module and a REPE (RANSAC-Extended Kalman Particle Filter) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More