

AGV, automatic storage device and working method
A technology of guide rail device and driving wheel, which is applied in the direction of storage device, transportation and packaging, etc., and can solve the problems of low efficiency of accessing goods, limitation of the number of automated machines, inconvenience, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
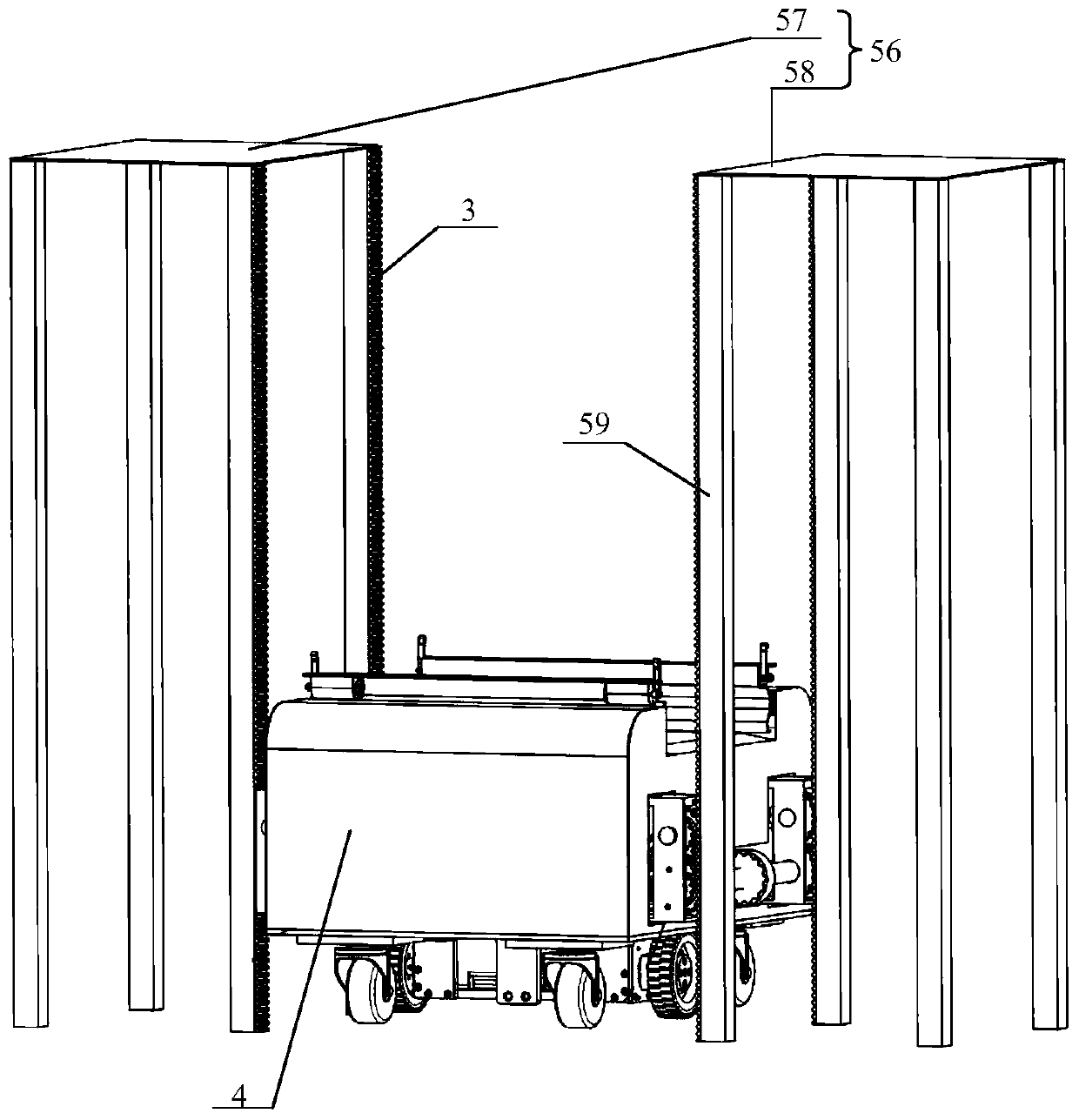
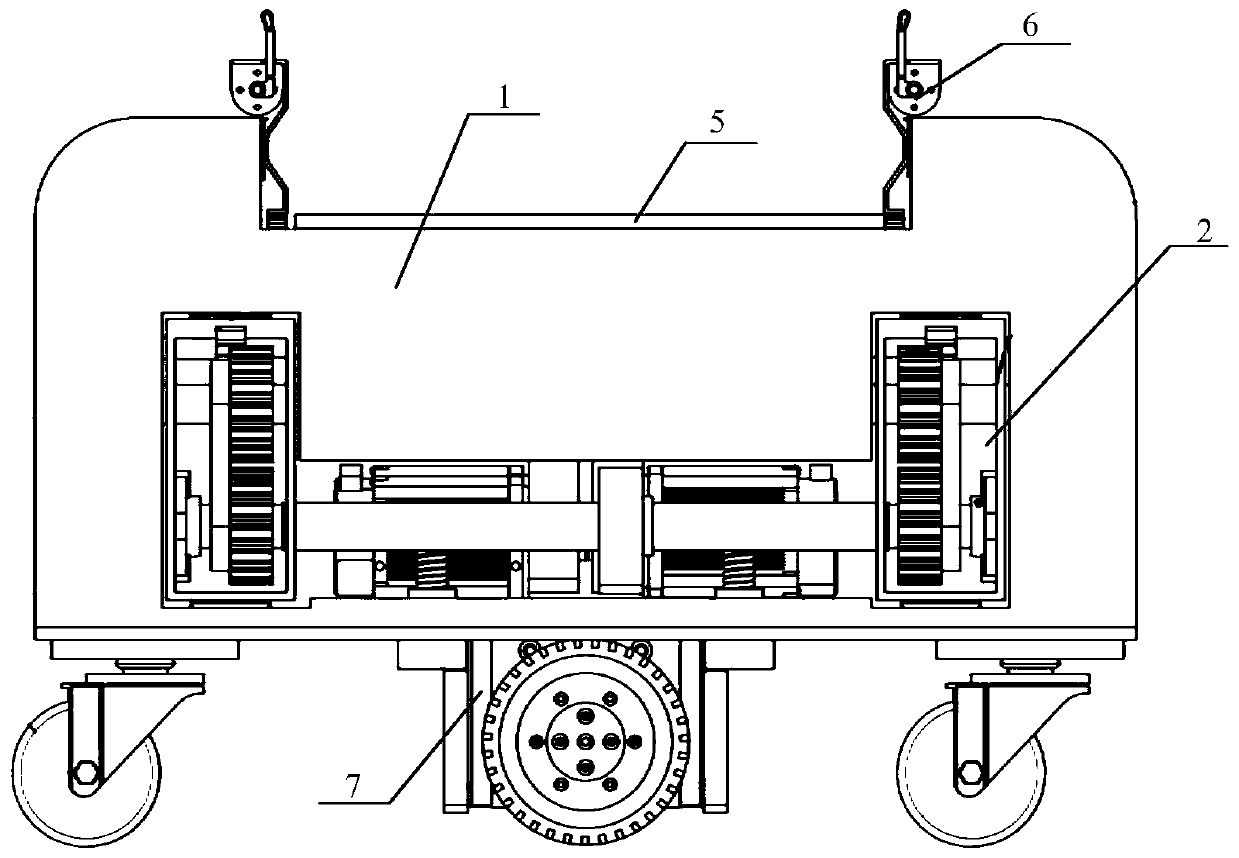
[0071] An AGV, such as Figure 1-14 As shown, it includes a car body 1 and a climbing mechanism 2 arranged on the car body 1. The climbing mechanism 2 includes a telescopic mechanism and a climbing mechanism. The climbing mechanism 2 is used to cooperate with the climbing track 3 to drive the AGV 4 to move up and down; climbing There are two sets of mechanisms, which are symmetrically distributed on the left and right sides of the car body. They work synchronously but complete expansion and contraction independently without interfering with each other.
[0072] A loading platform 5 and a fork-type transfer mechanism 6 are arranged above the car body 1 , and a running mechanism 7 is arranged below the car body 1 .
[0073] In this embodiment, the telescopic mechanism is used to control the extension and retraction of the climbing mechanism, and the climbing mechanism is used to cooperate with the climbing rail 3 to realize the up and down movement of the car body 1. Through the...
Embodiment 2
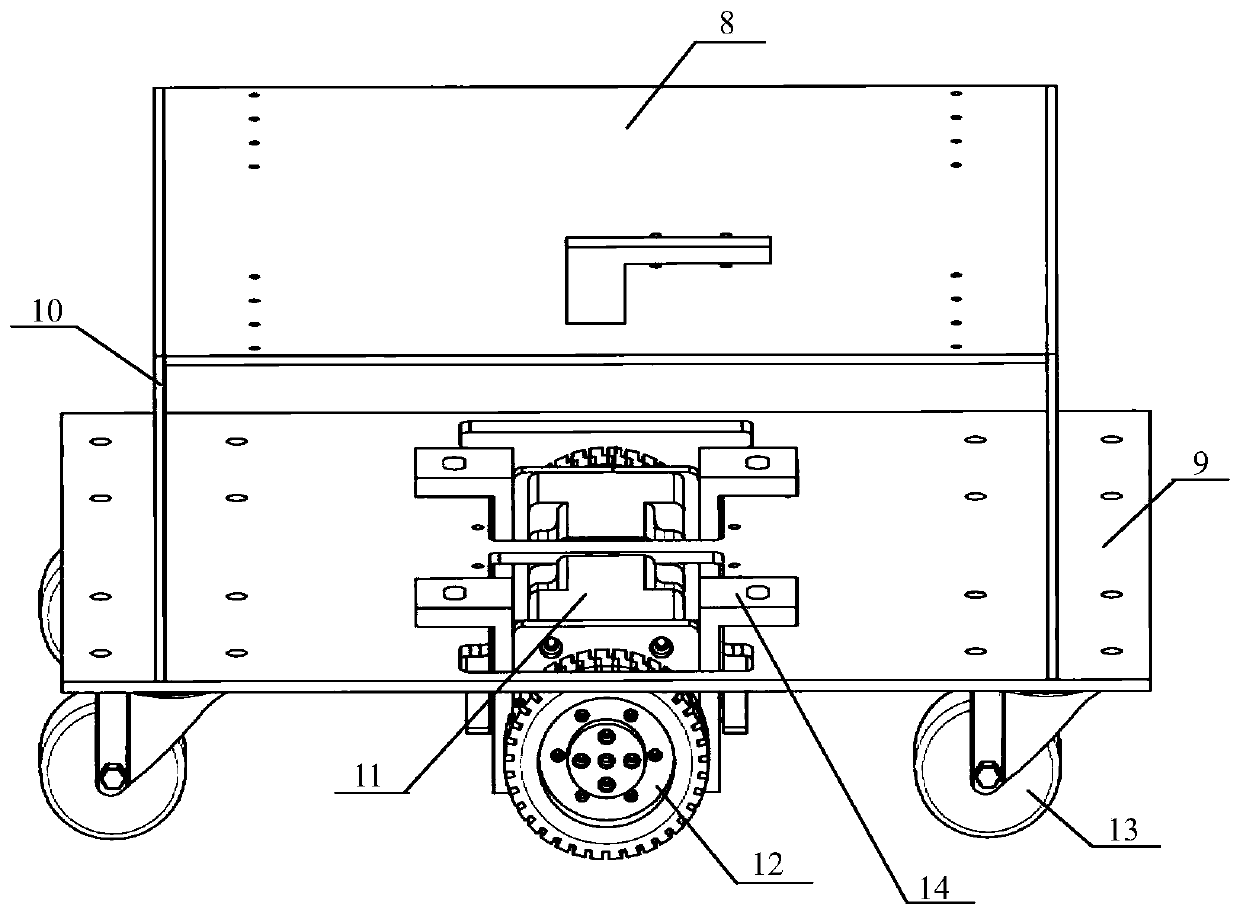
[0075] A kind of AGV, structure is as shown in embodiment 1, difference is, as image 3 As shown, the car body 1 includes a top plate 8, a base plate 9 and a three-dimensional plate 10, which are welded and connected between the top plate 8, the bottom plate 9 and the three-dimensional plate 10, and the running mechanism 7 includes a driving drive motor 11, a walking driving wheel 12 and a walking driven wheel 13, It is preferably one group of walking driving wheels and two groups of walking driven wheels. The walking driving wheels 12 and the walking driven wheels 13 are respectively arranged in the middle and both sides of the bottom of the base plate 9, and the walking drive motor 11 is arranged at the bottom of the base plate 9. The fixture 14 is fixed on the bottom of the base plate 9, and the output shaft of the walking drive motor 11 is connected with the driving driving wheel 12 to drive the driving driving wheel 12 to move, and drives the driven wheel 13 to move.
Embodiment 3
[0077] A kind of AGV, structure is as shown in embodiment 2, difference is, as Figure 4 as shown in Figure 4 As shown, there are two sets of telescopic mechanisms working synchronously, which are symmetrically distributed on the left and right sides of the AGV. Each set of telescopic mechanisms does not interfere with each other and realizes telescopic synchronously. Shaft 17, rack and pinion transmission mechanism 18 and telescopic slider guide rail device A 19;
[0078]Telescopic drive shaft 15 is fixed on three-dimensional plate 10 both sides by end cover bearing 20, and the output shaft of telescopic drive shaft 17 is connected with synchronous belt pulley A 21, and telescopic drive shaft is provided with synchronous belt pulley B 22, synchronous belt pulley A 21 and A retractable synchronous belt 16 is arranged between the synchronous pulley B 22, and a rack and pinion transmission mechanism 18 is provided at both ends of the telescopic drive shaft 17, and the rack and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More