

Static calibration method for camera external parameters
A technology of external parameters and calibration methods, applied in image data processing, instruments, calculations, etc., can solve problems such as inapplicable calibration methods, lack of reprojection and transformation matrices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
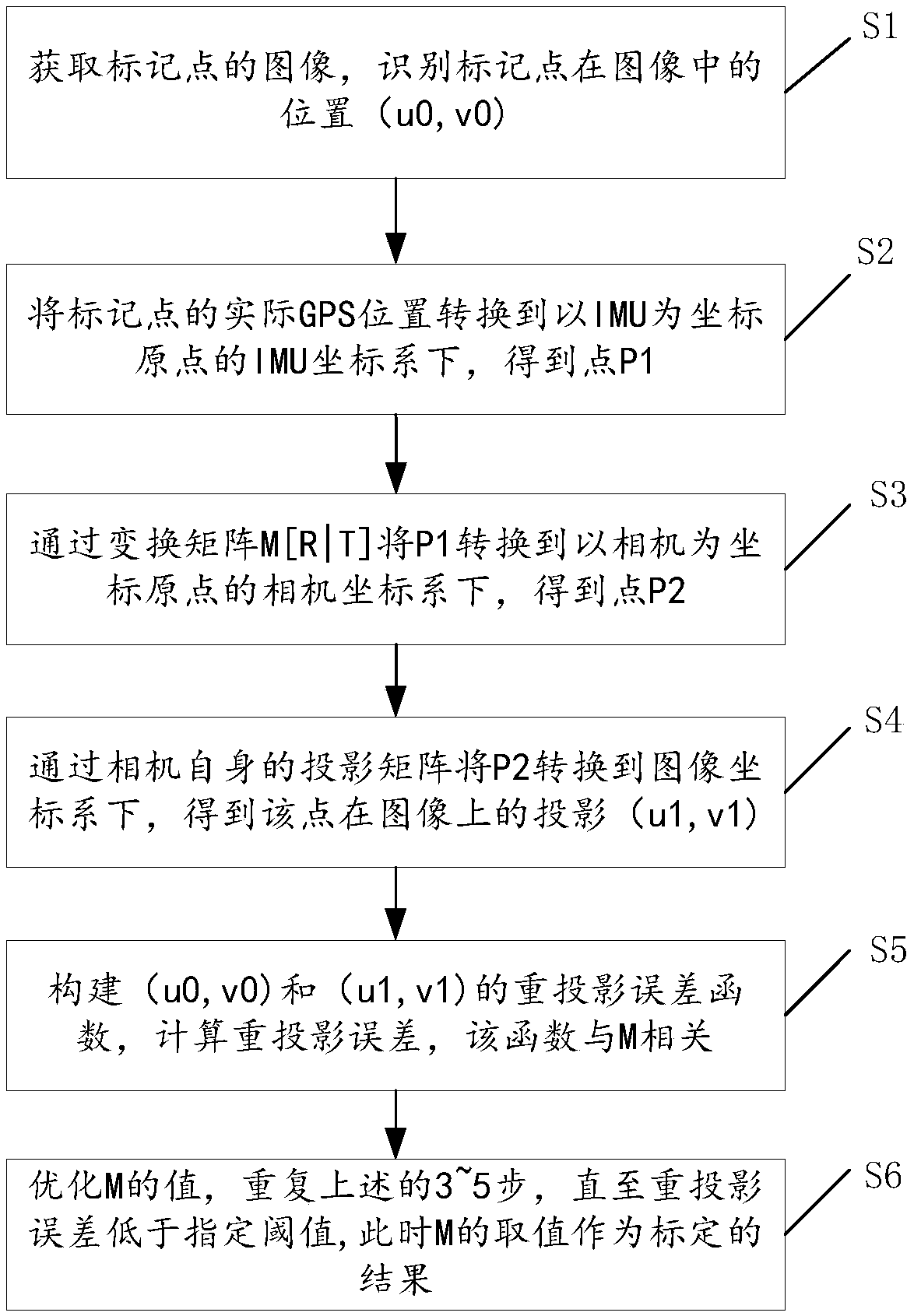
[0042] In this embodiment, through multiple high-resolution cameras or cameras on the top of the vehicle, 360-degree high-definition video or photographing can be realized. When the vehicle is stationary, the calibration method of the external parameters of the camera includes the following steps:
[0043] Step S1: Set one or more marker points, acquire an image including the marker points from the camera on the top of the vehicle, and identify the position (u0, v0) of the marker points in the image. The position of the marker point in the image is the observation value. The marker point here can be a special signboard or a marker pole. Because it occupies a small area and the GPS position is known, the accuracy of the acquired signal is high; the marker point The GPS position is known, which can be measured in advance, obtained directly during calibration, or directly measured using RTK equipment during calibration.
[0044] Since there are 6 external parameters of the camera...
Embodiment 2
[0057] In this embodiment, multiple high-resolution video cameras or cameras can be arranged around the vehicle, as long as 360-degree high-definition video or photographing can be achieved, the method for calibrating the external parameters of the camera includes the following steps:
[0058] Step S1: Set one or more marker points, use cameras or cameras around the vehicle to acquire images including the marker points, and identify the positions (u0, v0) of the marker points in the image. Here, the position coordinates of the marked points in the image can be calculated by the trained neural network, which is trained by a large amount of existing data (that is, the positions of the known marked points in the image have corresponding coordinates).
[0059] Step S2: Convert the actual GPS position of the marked point to the IMU coordinate system with the IMU as the coordinate origin to obtain point P1. Here, the GPS position and the IMU coordinates are both three-dimensional co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More