Dynamic calibration method for camera external parameters
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
An external parameter, dynamic calibration technology, applied in image data processing, instruments, calculations, etc., can solve the problem of long time and achieve the effect of short time
Pending Publication Date: 2020-04-07
BEIJING MOMENTA TECH CO LTD
View PDF22 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Therefore, it is necessary to continuously move the vehicle and marking points to complete a calibration, and it takes a long time to complete an external parameter calibration using a static calibration method
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0048] In this embodiment, through multiple high-resolution cameras on the top of the vehicle, 360-degree high-definition video or photographing can be realized. When the vehicle is stationary, the calibration method of the external parameters of the camera includes the following steps:
[0049] Step S1: set one or more marker points, when the vehicle is driving, preferably at a slow speed, the camera on the top of the vehicle acquires an image including the marker points, identifies the position (u0, v0) of the marker points in the image, and Get the GPS position of each marker. The mark point can be a semantic feature on the road (sign, light pole, etc.), no special settings are required, as long as the GPS position of the point is known, the mark point can be used for calibration.
[0050] Step S2: Project one or more marked points into the image through the transformation matrix M[T|t] to obtain the theoretical projection coordinates (u1, v1) of the point on the image.
...
Embodiment 2
[0063] In this embodiment, multiple high-resolution video cameras or cameras can be arranged around the vehicle, as long as 360-degree high-definition video or photographing can be achieved, the method for calibrating the external parameters of the camera includes the following steps:
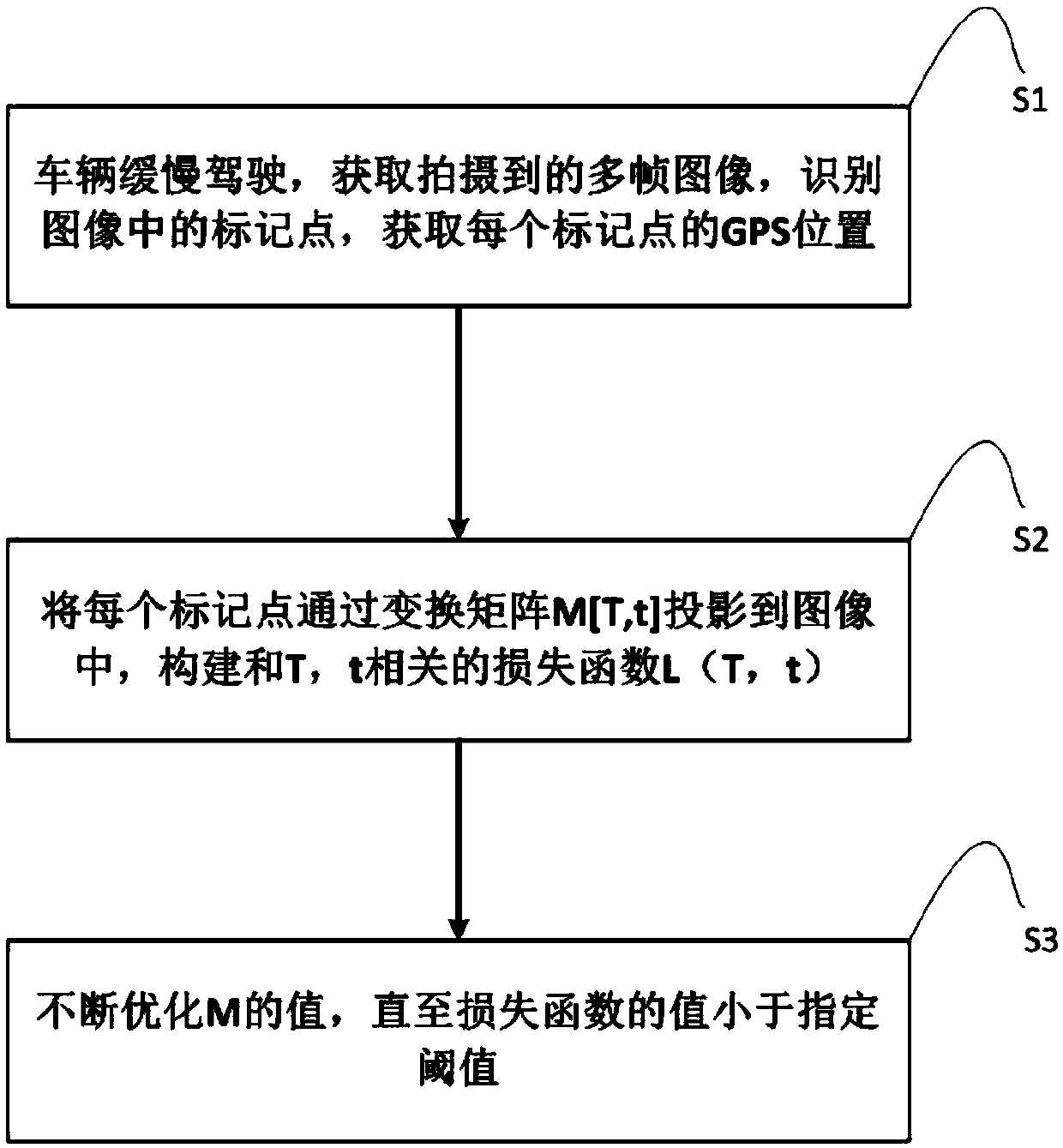
[0064] Step S1: The vehicle is moving slowly, cameras or cameras are set up around the vehicle, multiple frames of images are acquired, and the position (u0, v0) of one or more marker points in the image is identified. Here, the position coordinates of the marked points in the image can be calculated by the trained neural network, which is trained by a large amount of existing data (that is, the positions of the known marked points in the image have corresponding coordinates).
[0065] Step S2: Convert the actual GPS position of the marked point to the IMU coordinate system with the IMU as the coordinate origin to obtain point P1. Here, the GPS position and the IMU coordinates are both three-di...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a dynamic calibration method for camera external parameters. The method comprises the steps that S1, in the slow running process of a vehicle, one or more marking points are set, and the position of a corresponding GPS is obtained; S2, projecting the one or more mark points into an image acquired by the vehicle camera device through a transformation matrix M [T | t] to obtain theoretical projection coordinates of the one or more mark points on the image; and S3, constructing a loss function related to T and t, and calculating an error. A loss function related to a rotation and translation transformation matrix T and time delay t is constructed between coordinate observation values of marking points in a camera device and coordinate estimation values obtained througha series of transformation, and calibration of T and t can be completed at a time.
Description
technical field [0001] The invention relates to the field of intelligent driving, in particular to a dynamic calibration method for external parameters of a camera. Background technique [0002] At present, the accuracy of autonomous driving maps is measured in the GPS coordinate system, which means that each point on the map needs to be represented by GPS coordinates. In a multi-sensor solution, the camera and GPS may not be installed at the same position in the vehicle at the same time, but may be separated by a distance of 2 to 3 meters. Therefore, it is necessary to calibrate the external parameters of the camera and establish the spatial position relationship between the camera and the GPS module. If the calibration of the camera's external parameters is not carried out, and the map is constructed directly based on the camera image and the position of the car body, an error of two or three meters may eventually occur. [0003] The traditional calibration method needs ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.





 Login to View More
Login to View More  Login to View More
Login to View More