

A mechanical arm mechanism for tumor resection
A robotic arm and tumor technology, applied in the field of intelligent equipment, can solve problems such as the improvement of the control method of the robotic arm, and achieve the effects of simple and flexible fine-tuning methods, wide application ranges, and flexible adjustment methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
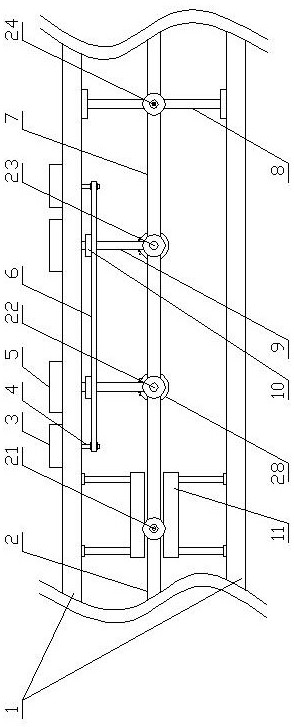
[0034] A mechanical arm mechanism for tumor resection, comprising an operating arm body, one end of the operating arm body is provided with an instrument installation end, and the other end is connected with a transmission connector; a fine-tuning mechanism is arranged in the middle of the operating arm body.
[0035] fine-tuning mechanism such as Figure 1-10 As shown; the fine-tuning mechanism includes an outer frame body 1 and a linkage fine-tuning structure 2 arranged in the outer frame body 1, the position of the instrument mounting end is fine-tuned by the linkage fine-tuning structure 2, and the large-scale position adjustment of the instrument mounting end still adopts the prior art in X , Y, and Z-axis directions for large-scale adjustment, this kind of fine-tuning is only for fine-tuning the front and rear distances of the instrument installation end, the linkage fine-tuning structure 2 is connected to the instrument installation end at one end, and the other end is c...
Embodiment 2
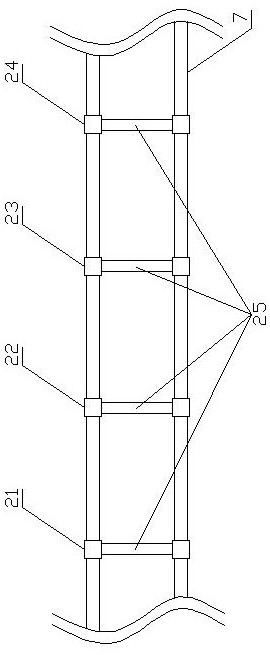
[0043] Such as Figure 11 As shown, compared with Embodiment 1, in this embodiment, an auxiliary telescopic rod 13 is connected below the first lifting shaft 22 and the second lifting shaft 23, and the auxiliary telescopic rod 13 is fixed on the inner wall of the outer frame body 1 Above, it can assist the first lifting shaft 22 and the second lifting shaft 23 to keep stable, and the auxiliary telescopic rod 13 can use a spring telescopic rod or a sleeve type telescopic tube to assist the first lifting shaft 22 and the second lifting shaft 23 The up and down displacement always maintains the vertical state.
Embodiment 3
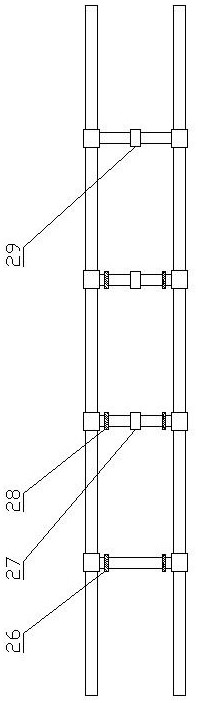
[0045] Such as Figure 12 As shown, compared with Embodiment 1, this embodiment has three connecting shafts in this embodiment, which are respectively a moving shaft, a lifting shaft and a fixed shaft, wherein the lifting shaft can move upwards in the vertical direction.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More