

Instrument transmission seat for minimally invasive surgical instrument
A technology of minimally invasive surgery and transmission seat, applied in the field of medical devices, can solve the problems of inability to simulate the integrated movement of human arms, wrists and fingers, and inability to meet doctors' requirements for freedom, flexibility and sensitivity of surgical instruments, etc. To achieve the effect of eliminating manual docking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be further described below in conjunction with accompanying drawing.
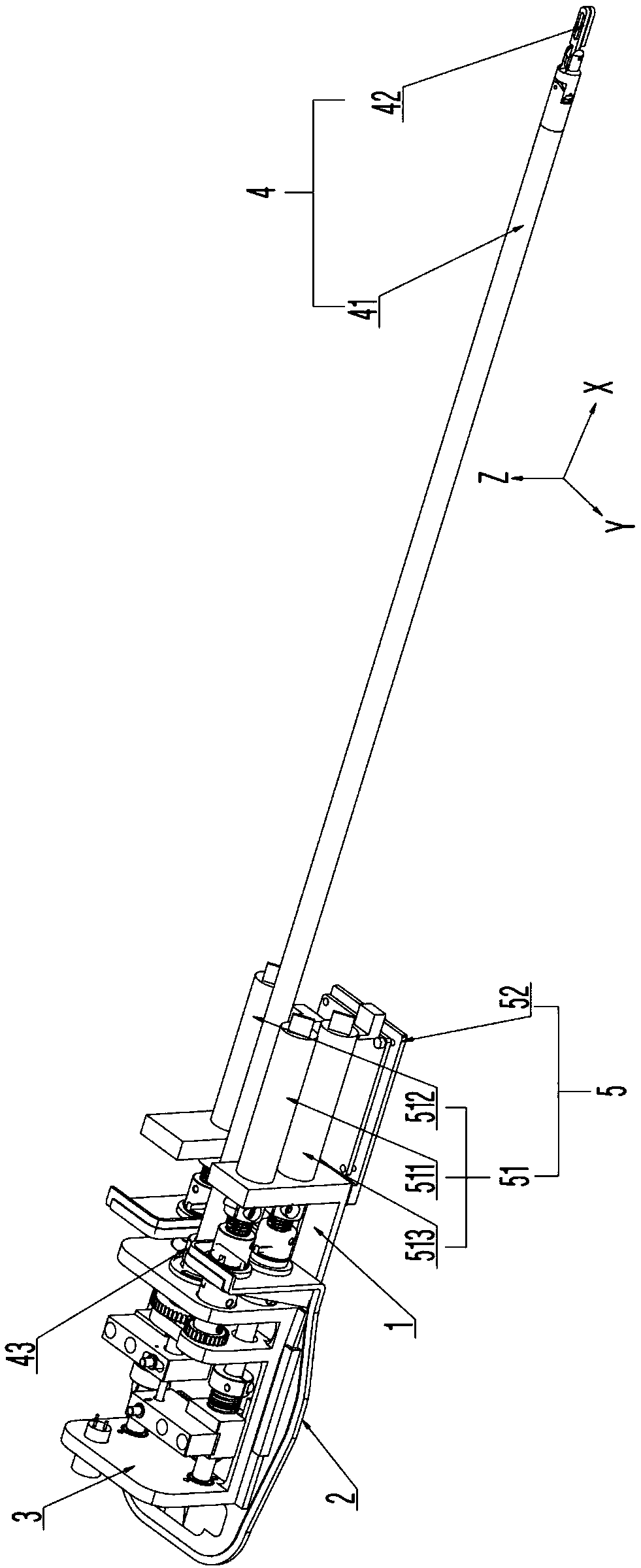
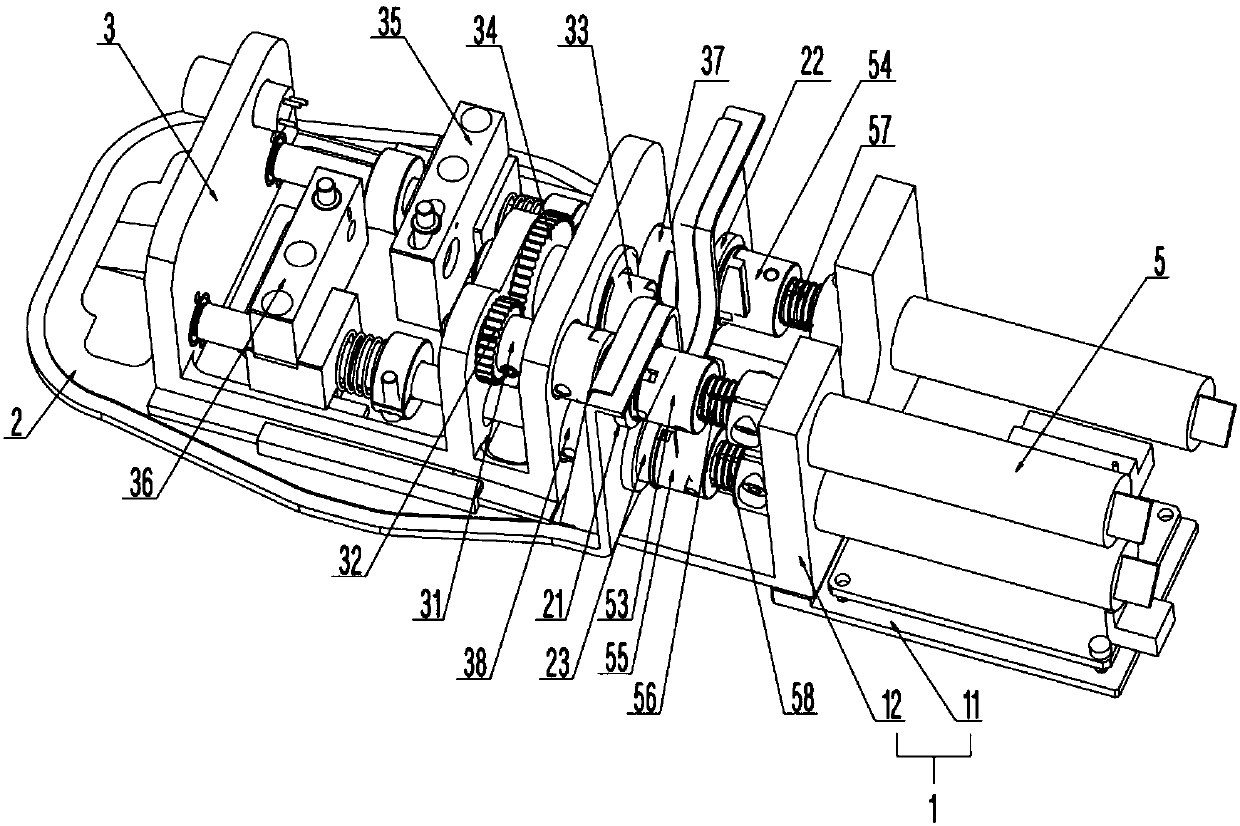
[0074] Such as figure 1 and 2 As shown, the present invention provides an instrument fixing device for a laparoscopic surgical robot, which includes a drive base 1 , an isolation base 2 disposed on the drive base 1 , and a transmission base 3 disposed on the isolation base 2 . Wherein, the driving seat 3 is provided with an instrument connecting mechanism 4 , and the driving seat 1 is fixed with a driving mechanism 5 . In addition, the driving seat 1 also supports the instrument connecting mechanism 4 .
[0075] The connection manner among the driving seat 1 , the isolation seat 2 and the transmission seat 3 will be described in detail below.
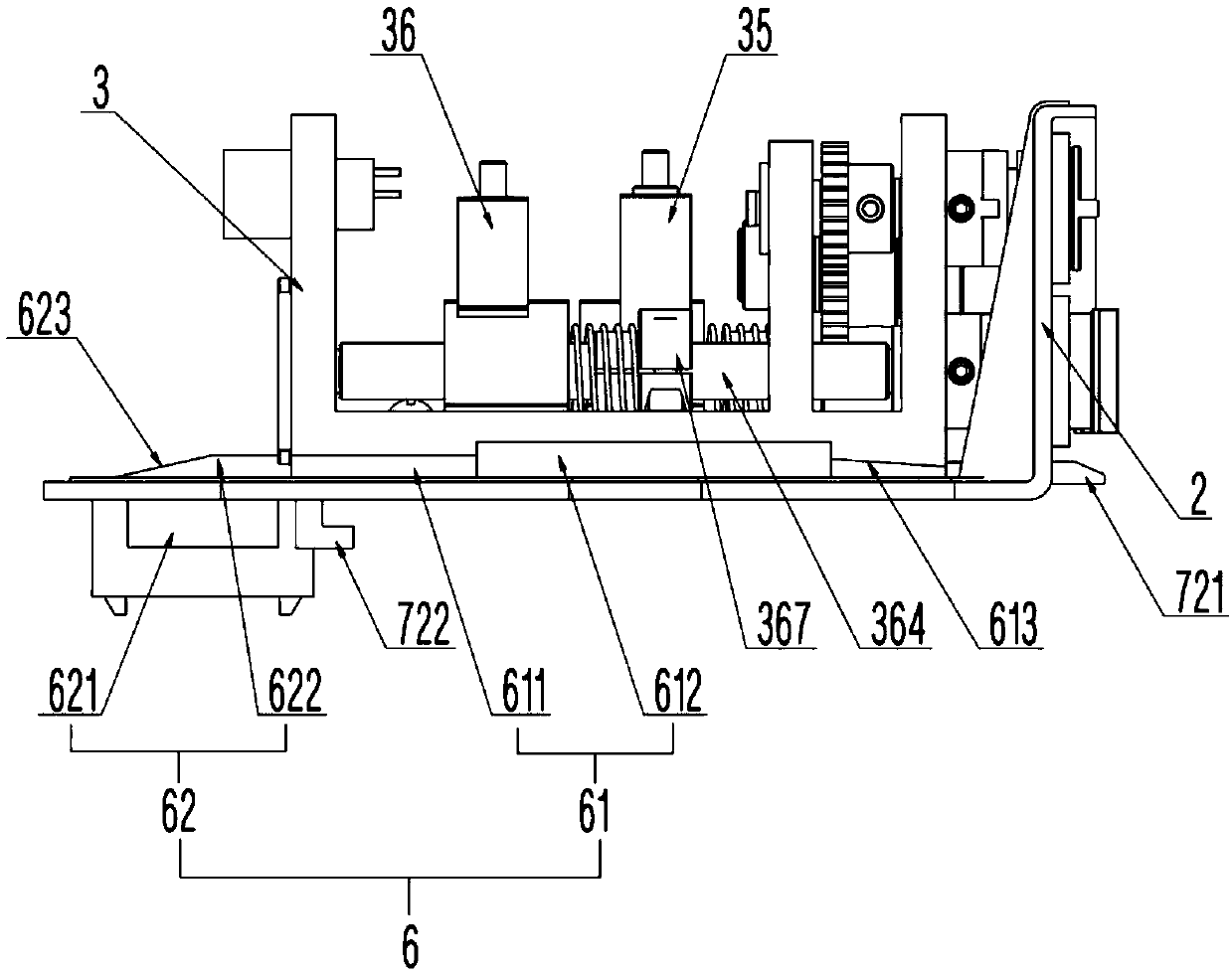
[0076] The transmission seat 3 and the isolation seat 2 are quickly connected through the first quick release structure 6 .
[0077] Such as image 3 As shown, the first quick-release structure 6 includes a first positioning port...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More