Automatic parking path planning method based on B spline theory
An automatic parking and path planning technology, applied in the field of automatic parking, can solve problems such as poor adaptability to narrow parking spaces, large steering wheel steering range, and incomplete consideration of scenes, so as to avoid excessive steering range and overcome curvature Unsmooth, smooth vehicle motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
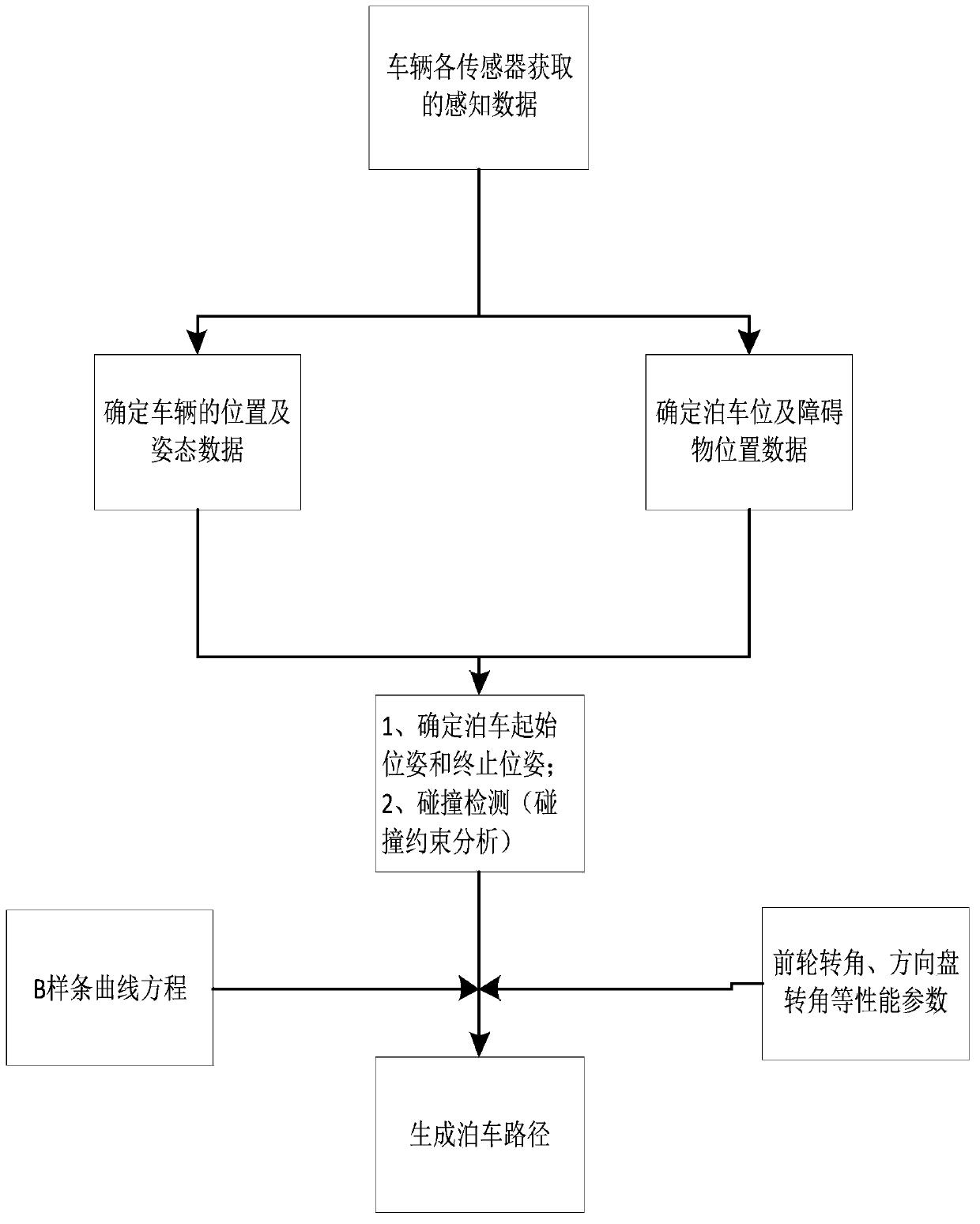
[0023] A method for automatic parking path planning based on B-spline theory, specifically comprising the following steps:
[0024] S1. Use the sensors installed on the vehicle body (including ultrasonic radar, camera or on-board millimeter-wave radar, etc.) to determine the specific position of the vehicle and the azimuth angle of the vehicle, and the size of the parking space and obstacles obtained by detecting the surrounding environment of the vehicle through the sensor The relative positional relationship between the object and the vehicle, so as to determine the coordinate relationship between the vehicle and the parking space;
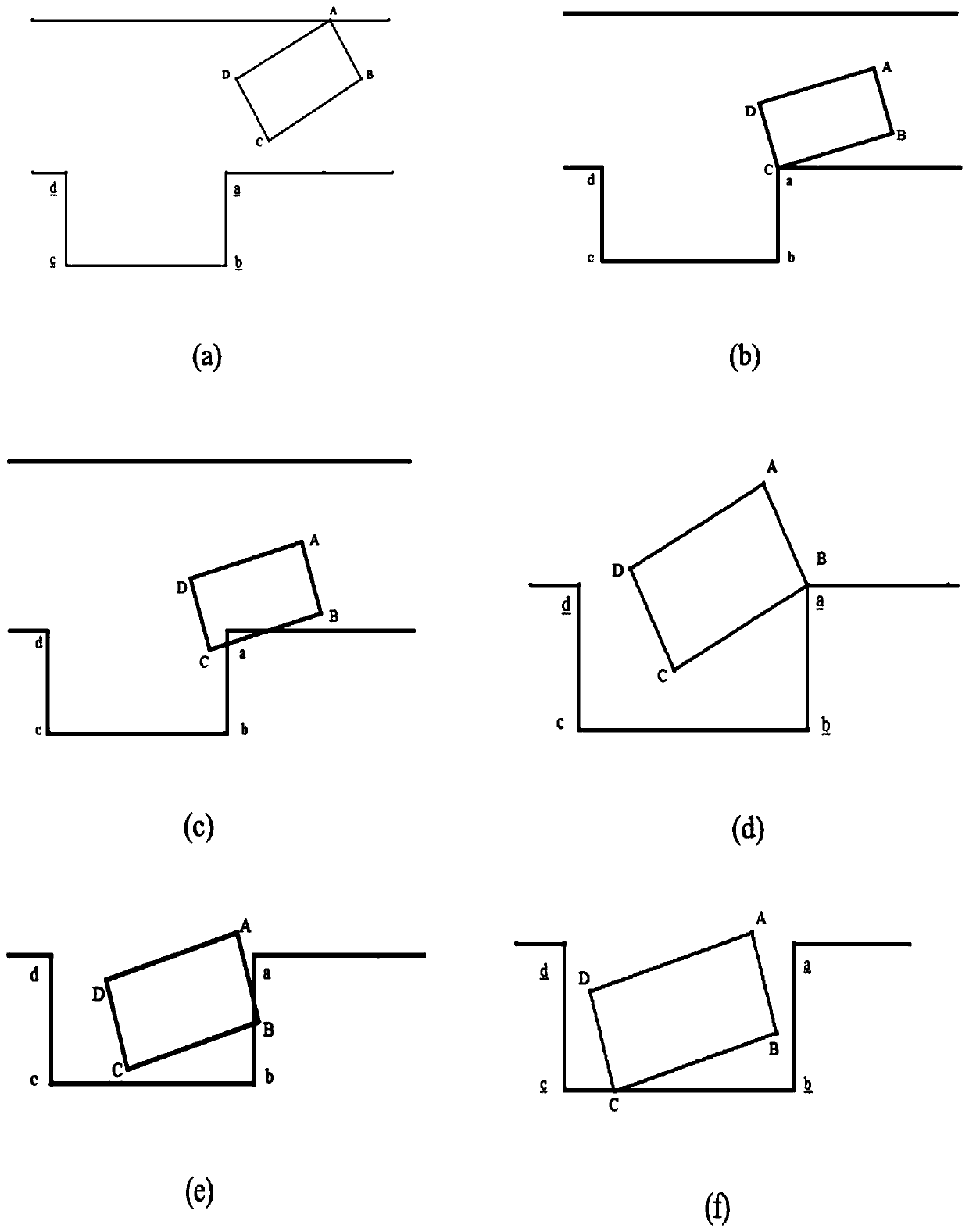
[0025] S2. According to the outline of the vehicle and the parking space, the vehicle and the parking space are simplified into a rectangle ABCD and a rectangle abcd respectively, and the collision constraint analysis is carried out in combination with the outline coordinate information of the vehicle and the parking space, in order to ensure tha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com