

Wrist two-degree-of-freedom flexible rope driven exoskeleton type upper limb rehabilitation training robot
A rehabilitation training and flexible rope technology, applied in the field of rehabilitation robots, can solve problems such as not easy to wear, low space utilization, large inertia, etc., to achieve all-round safe and reliable rehabilitation training, avoid secondary injuries, and high space utilization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
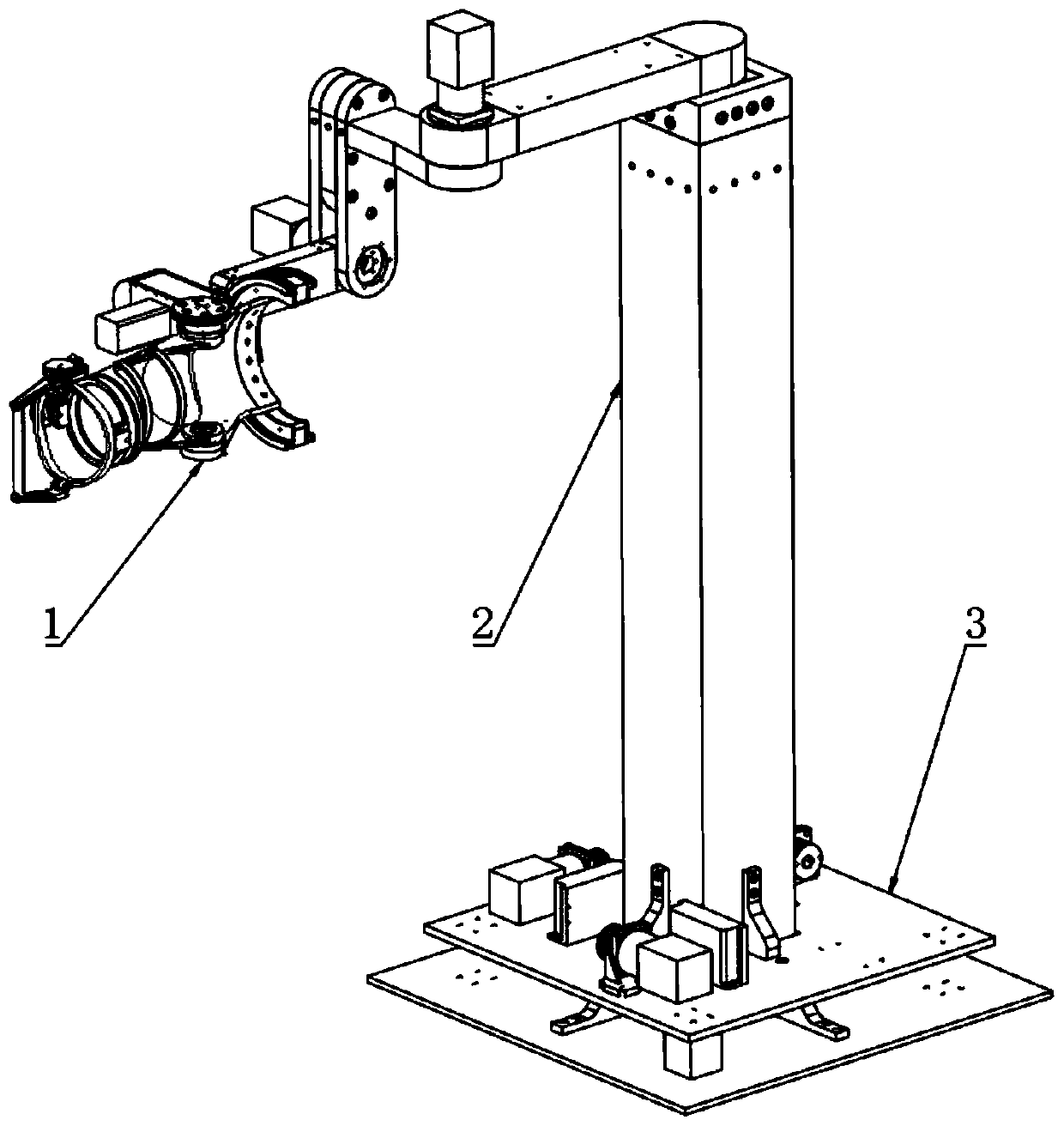
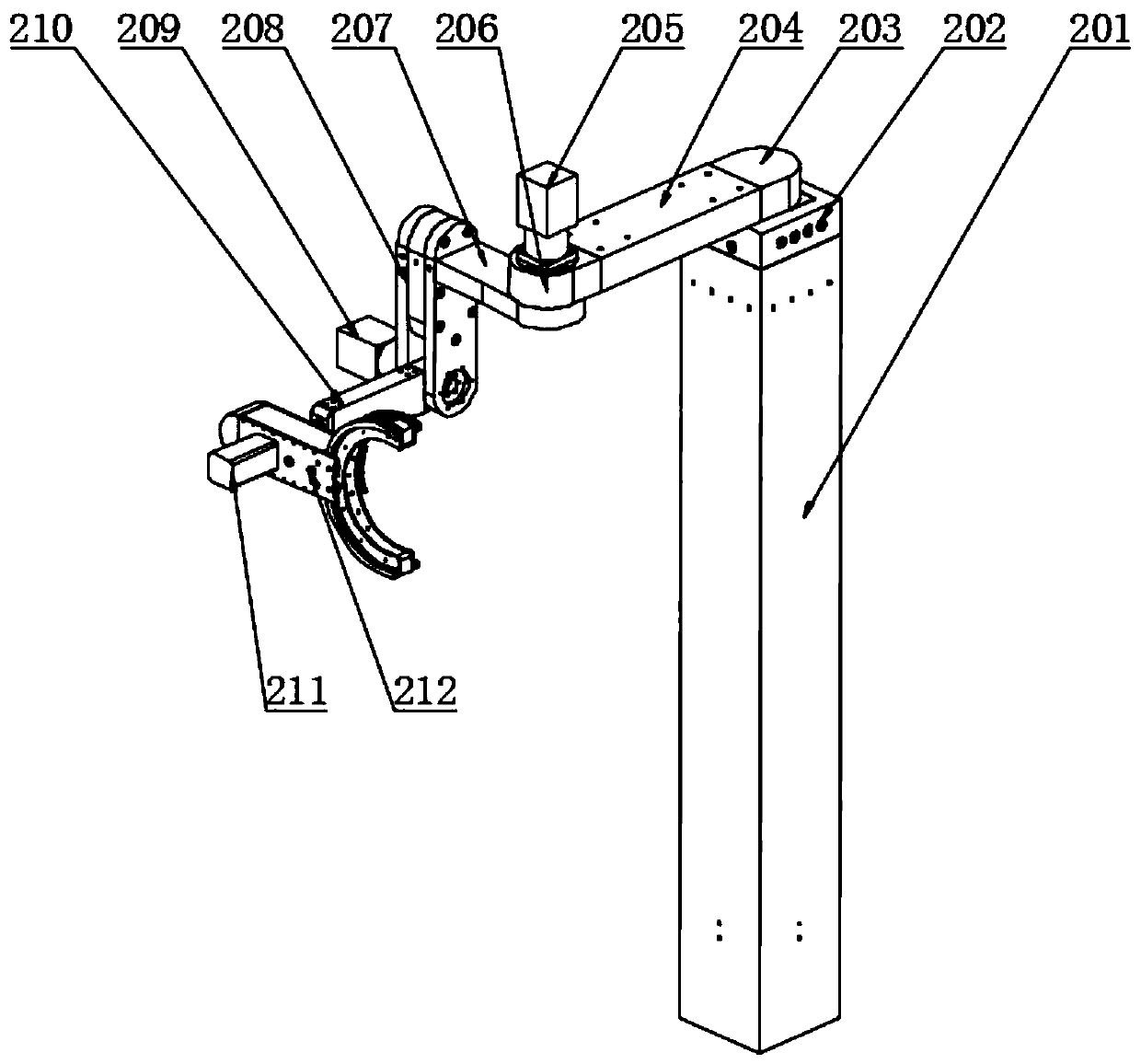
[0011] 1. See figure 1 , figure 2 , image 3 , Figure 4 , a kind of wrist two-degree-of-freedom flexible rope-driven exoskeleton type upper limb rehabilitation training robot provided by the present invention, its composition includes: wrist and elbow movable part 1, arm support part 2 and ground fixed part 3, wherein the wrist and The large arm wearing device 105 in the elbow movable part 1 is connected with the arc-shaped guide rail module 212 in the arm support part 2 by screws, the column 201 in the arm support part 2 is connected with the reinforcing rib 303 in the ground fixed part 3 by screws, and the ground The large chassis 307 in the fixed part 3 is connected with the ground by bolts.
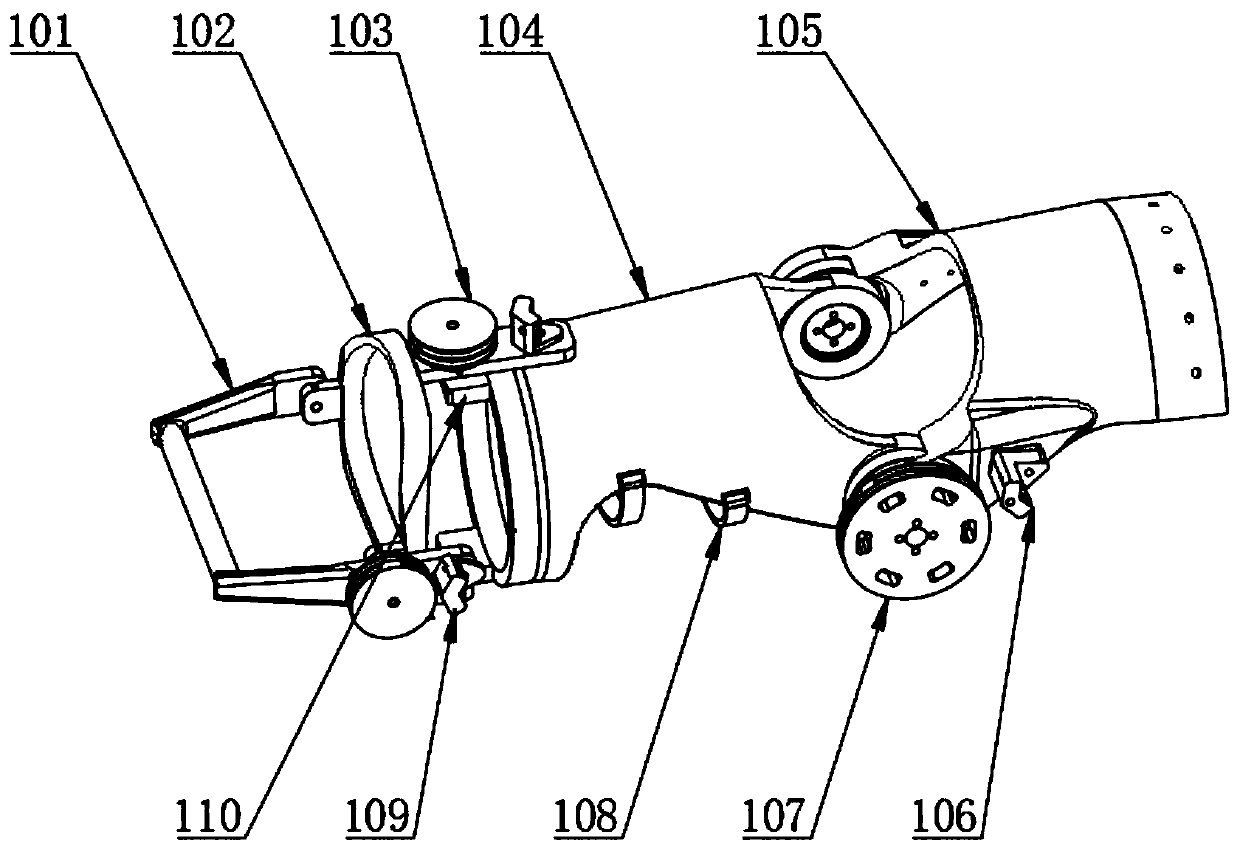
[0012] 2. See figure 2 , the wrist and elbow movable part 1 is composed of a hand fixing device 101, a support fixing device 102, a wrist adjustment wheel 103, a small arm wearing device 104, a large arm wearing device 105, an elbow limit block 106, and an elbow rotation The d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More