

Flexible exoskeleton glove device
A glove device and exoskeleton technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of secondary injury, bulky structure, squeezed or twisted fingers, etc., and achieve secondary injury prevention, precise control, and stretching The effect of smooth process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
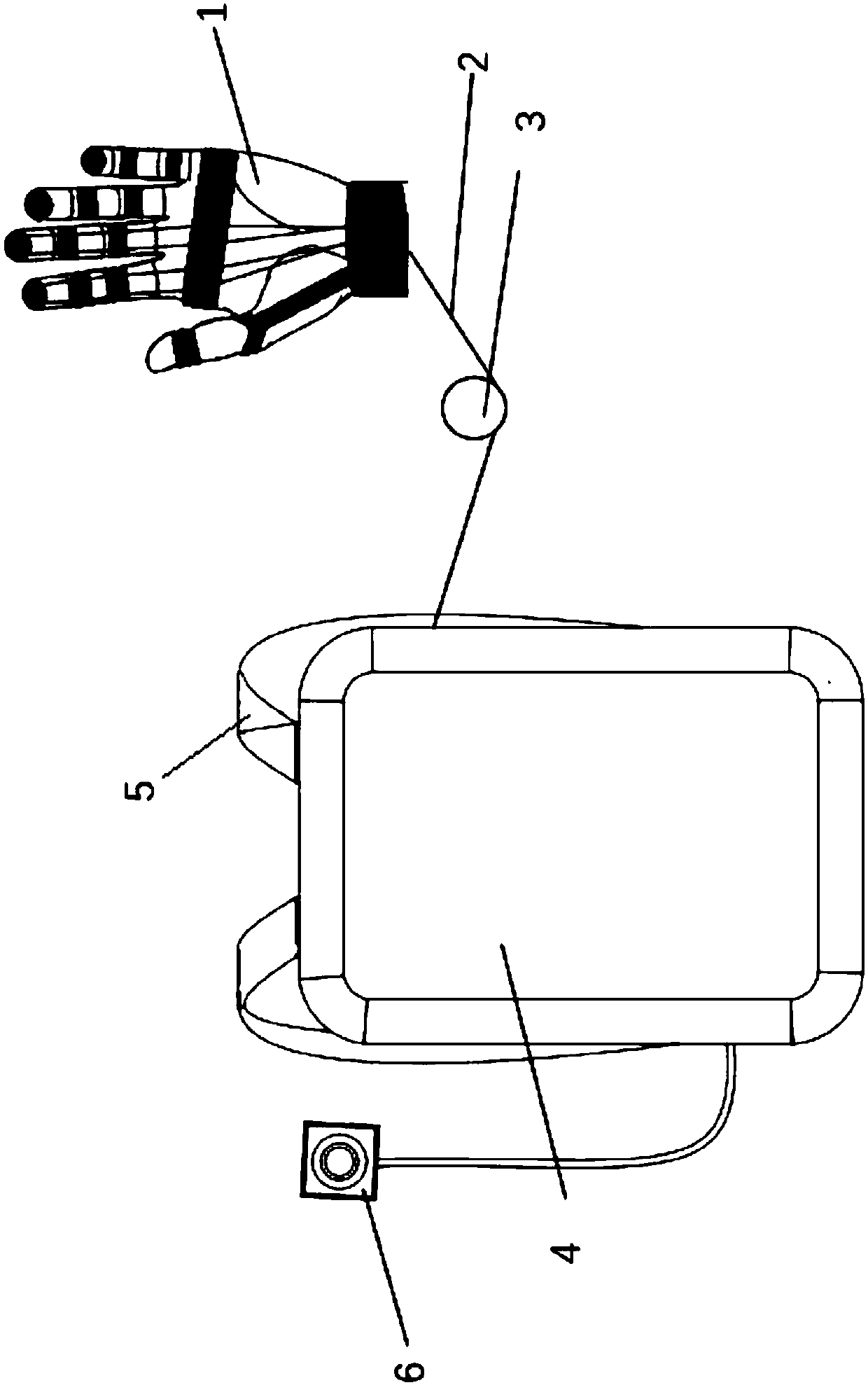
[0032] The present invention will be described in further detail below in conjunction with the accompanying drawings.
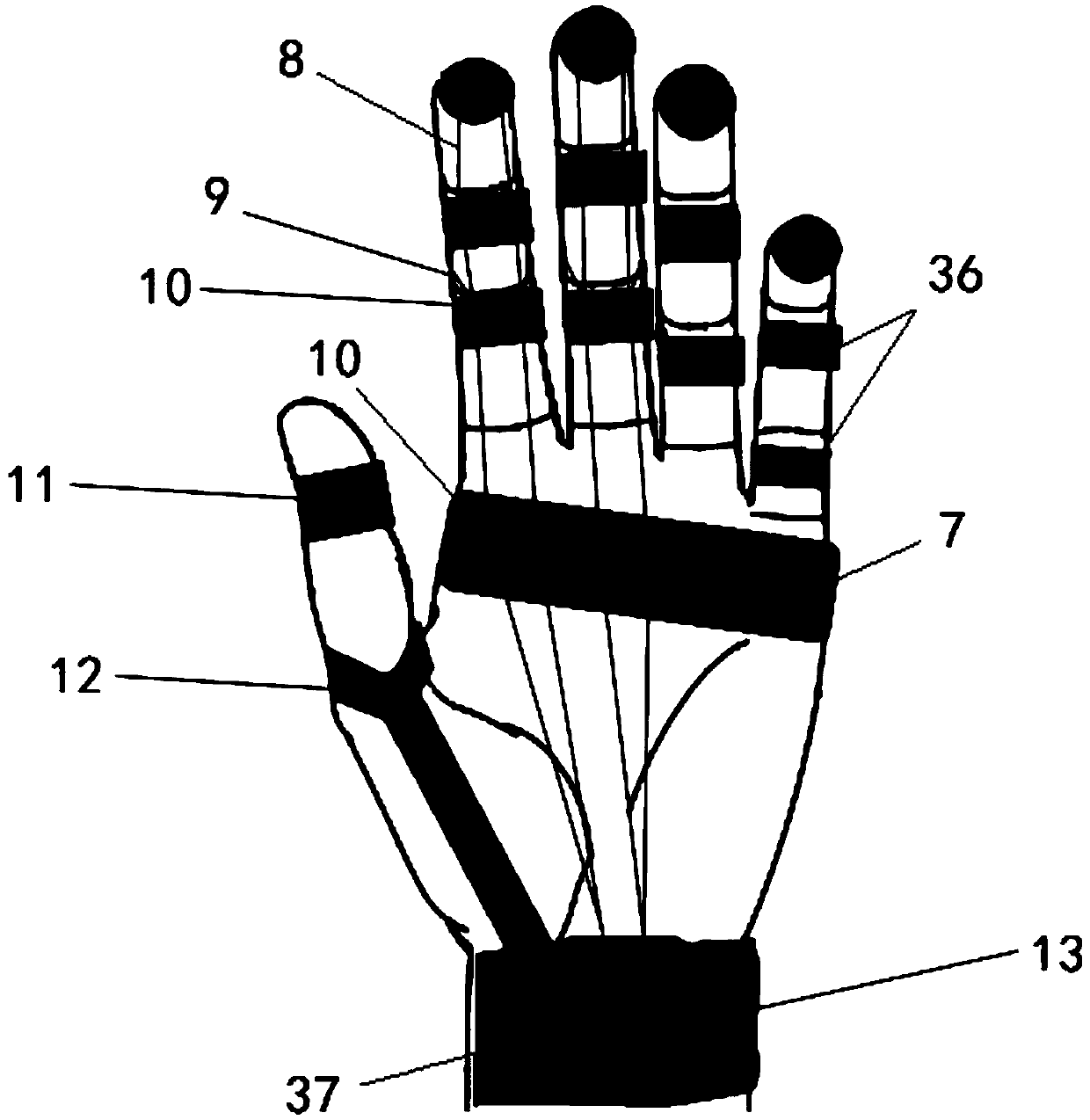
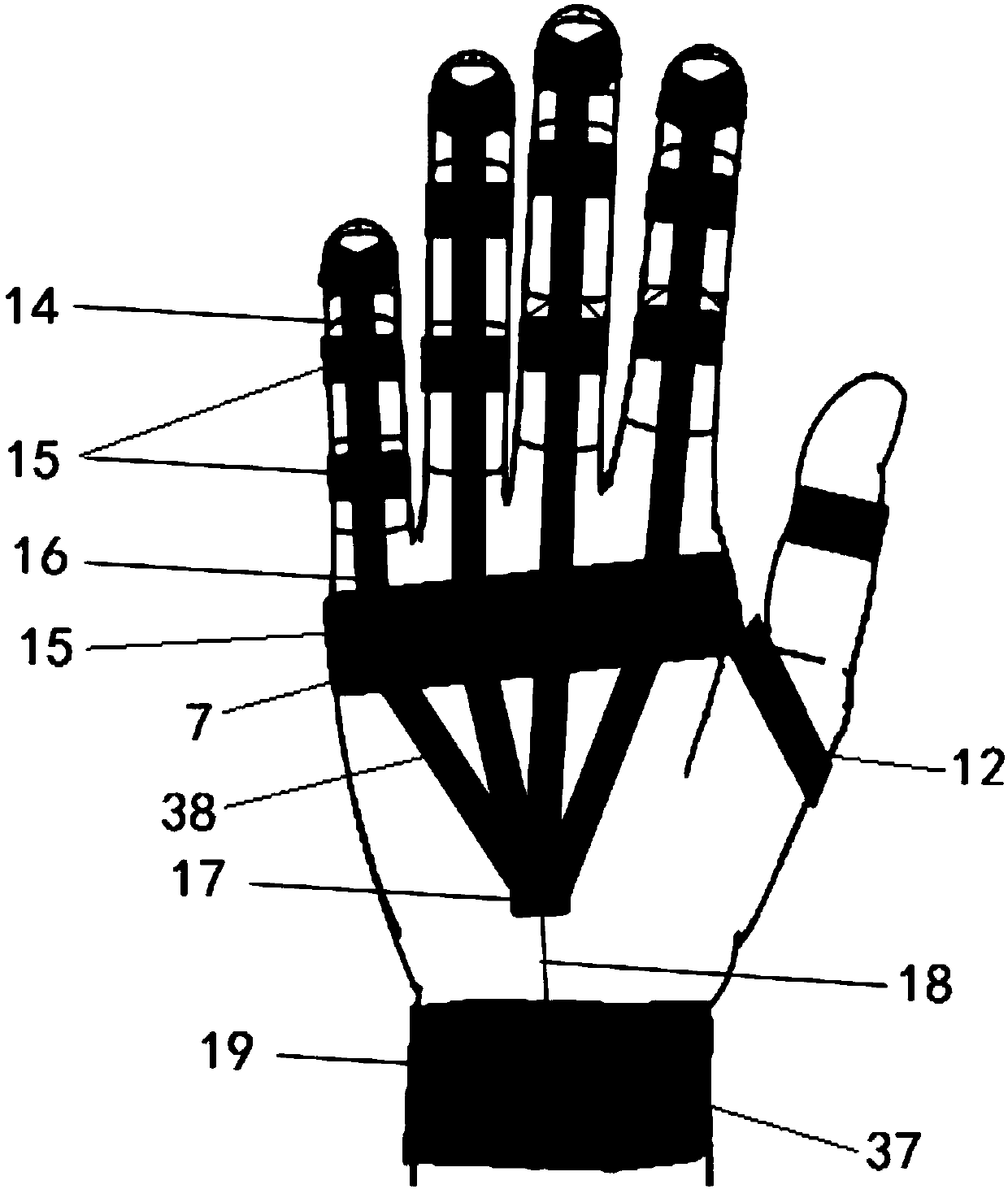
[0033] Such as Figure 1-7 As shown, the present invention includes a flexible exoskeleton glove 1 and a driving device 4, wherein as image 3 As shown, on the back of the hand side of the flexible exoskeleton glove 1, a flexible driving link and a driving line 18 on the back of the hand are provided. The driving line 18 on the back side of the hand is connected, such as figure 2 As shown, on the palm side of the flexible exoskeleton glove 1, a grip driving line 8 and a pinch driving line 9 are provided on the index finger and the middle finger, wherein the grip driving line 8 extends along the palm side of the finger and the end is connected to the The finger ends are connected, and the pinch drive line 9 extends along the palm side of the finger to any joint and then winds to the back side of the finger and is connected to the drive belt 16 on the back s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More