

Flexible adjustable manipulator for catching high-temperature steel plate
An adjustable, manipulator technology, applied in the field of hot stamping, can solve the problems of no manipulator, high cost, narrow range of use, etc., and achieve the effect of reducing extrusion deformation and compensating for brittleness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The content of the present invention and its specific implementation will be further described below in conjunction with the accompanying drawings.
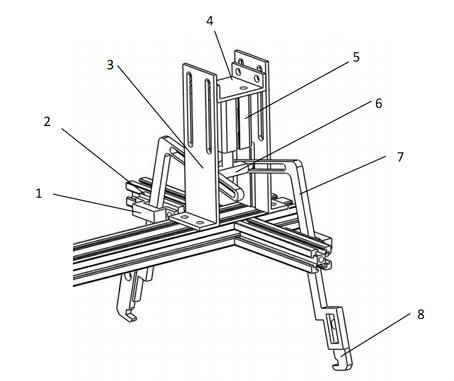
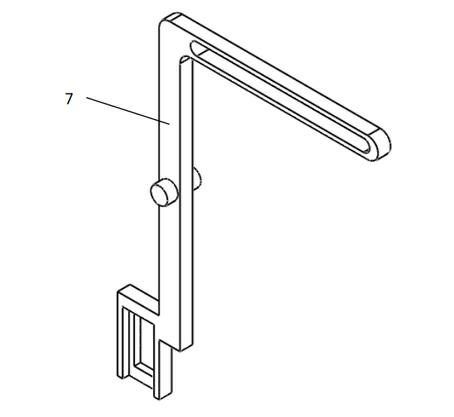
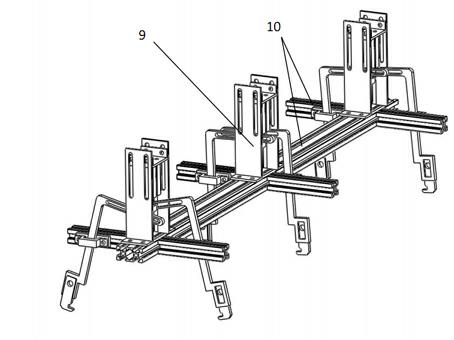
[0021] Such as image 3 As shown, the gripper is composed of several pairs of finger movement assemblies 9, and the number and installation positions of the pair finger movement assemblies 9 are determined according to the specific blank size. Such as figure 1 As shown, the cylinder bracket 2 is fixed on the aluminum profile frame, and there are long holes on the cylinder bracket to facilitate the installation of the cylinder base 4. A short cylinder with a compact structure is used as the power source, and a driving pin is installed on the head of the cylinder to drive the opening of the finger. swing together. There is a swivel pin in the middle section of the finger connector 7, which is embedded in the holes on the swivel bracket 1 and the swivel bracket base, and the cylinder connector 7 can swing by the swivel pin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More