A Collision Risk-Based Method for Delineating UAV Control Areas at Airports
A technology of collision risk and control area, applied in non-electric variable control, control/regulation system, 3D position/channel control, etc., can solve problems such as lack of relevant basis for delineation, loss of risk assessment accuracy, and large control area.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
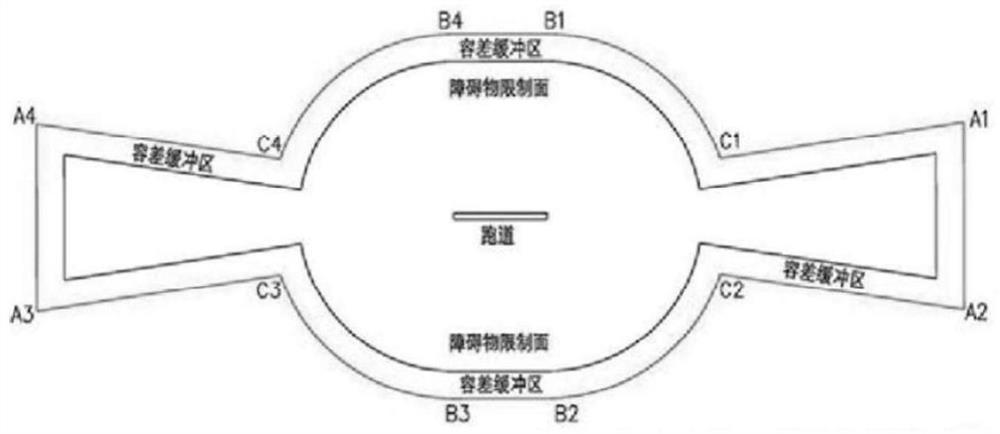
[0250] Such as Figure 6 Combined with the actual flight data of an airport in the past month, the specific implementation is as follows:
[0251] The characteristics of an airport are as follows:
[0252]The airport discussed is a single-runway airport, and the runway corresponds to an arrival procedure and a departure procedure, and the vicinity of the airport is flat;
[0253] The parameter s corresponding to the arrival segment and the departure segment 1 Both are 10,000 meters, and the expression of the segment curve and the corresponding error distribution are known;
[0254] S1 Designate the core area of the control area according to the collision risk probability e
[0255] The core area of the control area is mainly based on the operational performance of the flight segment, and the operational data is established after risk assessment.
[0256] 1.1 Entry procedure
[0257] Without loss of generality, the flight is on the final approach segment is a straigh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More