

Intelligent manned robot
A robotic and intelligent technology, applied in the field of robotics, can solve problems such as difficulty in achieving rehabilitation effects, inconvenient body upright or standing, and wheelchairs with single functions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
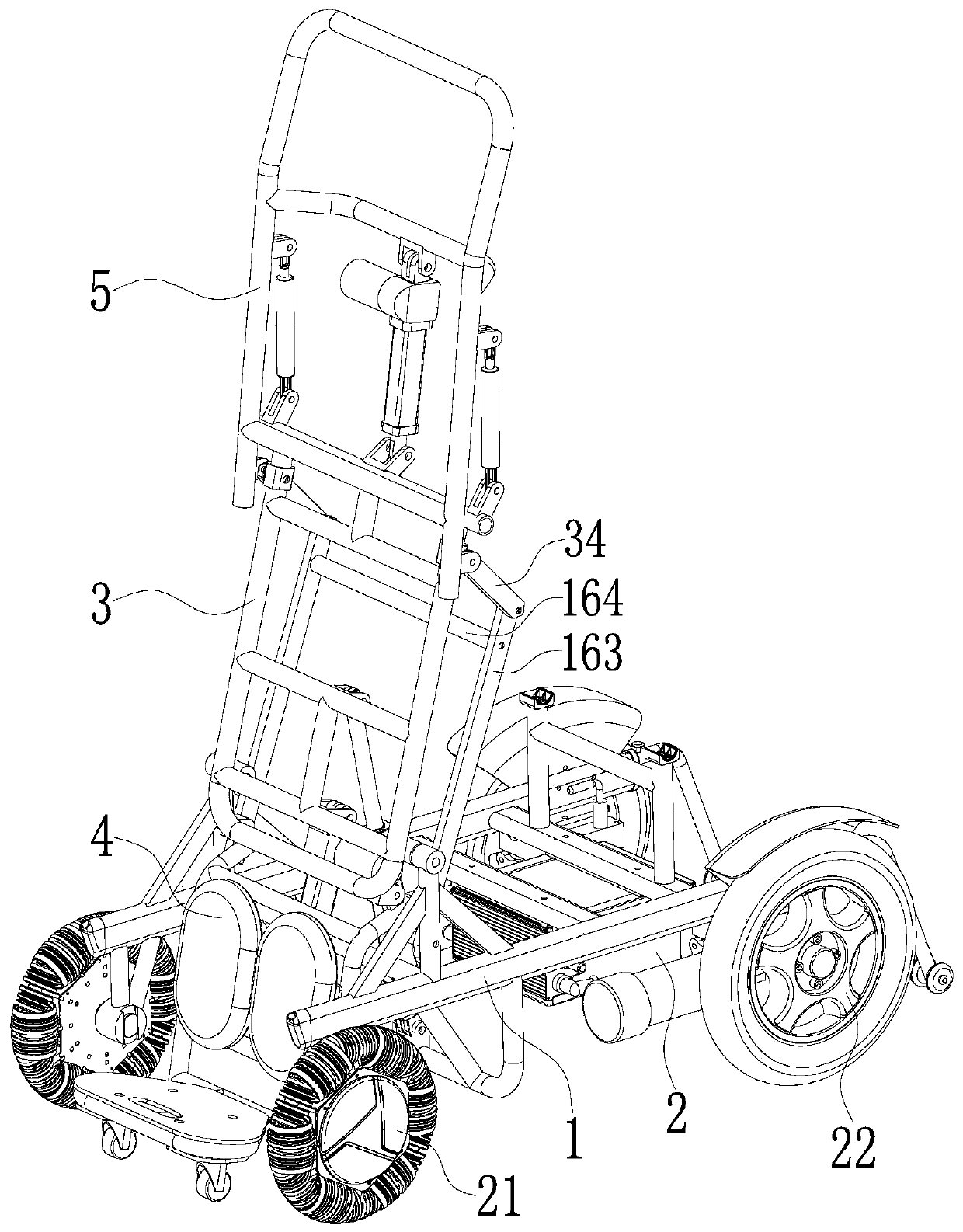
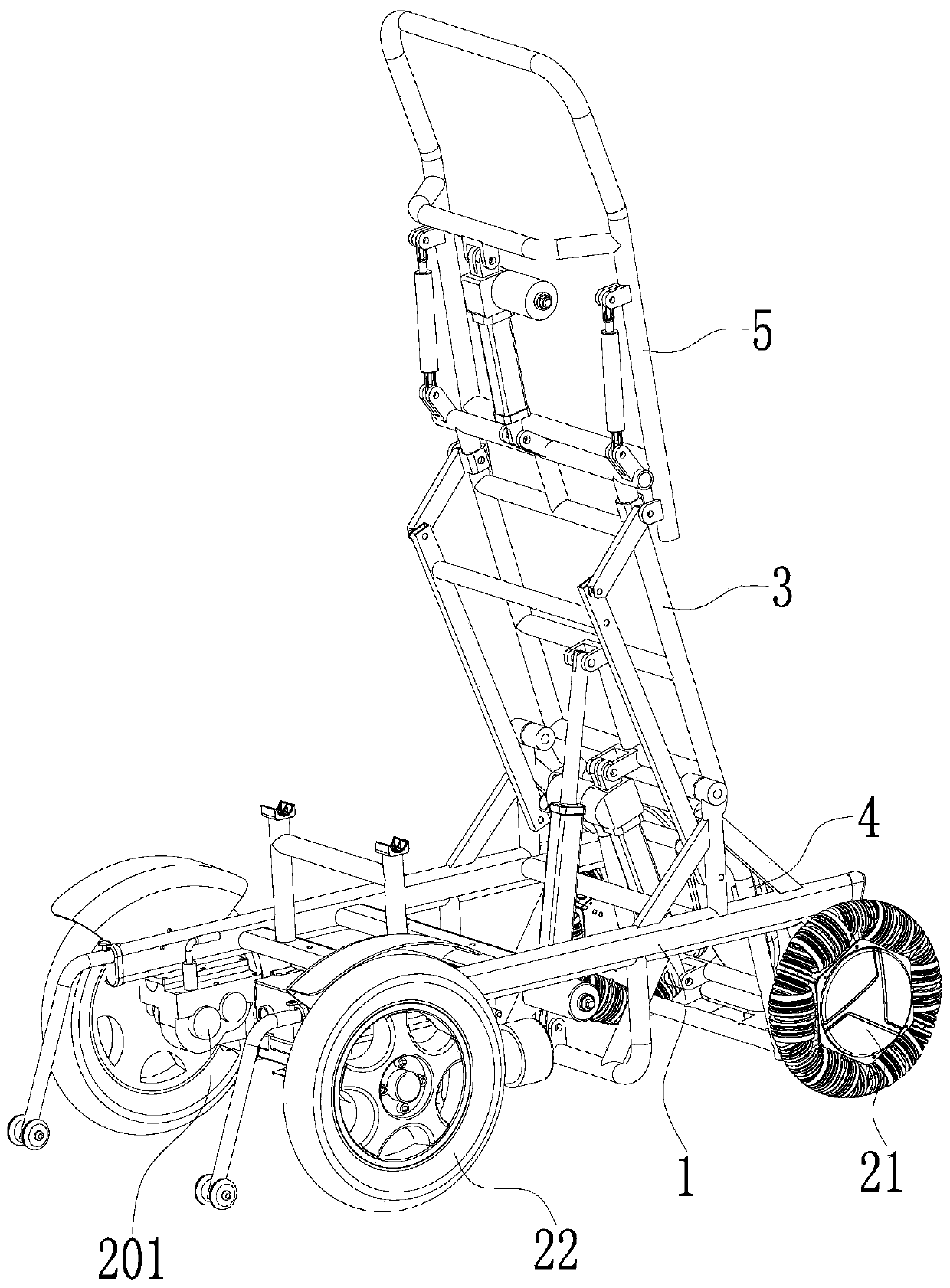
[0049] In this embodiment, the "front" of the relevant direction refers to the direction of the leg support 4 relative to the seat cushion support 3, and "rear" refers to the direction of the backrest support 5 relative to the seat cushion support 3.
[0050] refer to figure 1 and figure 2, the present embodiment provides an intelligent manned robot, comprising a load-bearing chassis 1, a front wheel 21 and a rear wheel 22 mounted on the load-bearing chassis 1, a seat hinged to the front of the load-bearing chassis and capable of abutting against the rear of the load-bearing chassis Cushion bracket 3, leg support 4 hinged with seat cushion bracket 3, backrest bracket 5 hinged with seat cushion bracket 3, electrical box 2 for installing controller 23 and battery 24 installed on the load-bearing chassis 1. The load-bearing chassis 1, seat cushion support 3, leg support 4 and backrest support 5 are all made of metal materials or alloy materials. Front wheel 21 and trailing whe...
Embodiment 2
[0091] refer to Figure 11 to Figure 16 The difference between the second embodiment and the first embodiment lies in the structure of the carrying chassis 6 .
[0092] In this embodiment, the bearing chassis 6 includes a first bearing bracket 61 and a second bearing bracket 62 . The second bearing bracket 62 is installed on the first bearing bracket 61 through a telescopic member. Both the two front wheels 21 and the two rear wheels 22 are installed on the first bearing bracket 61 . Two front wheels 21 and two rear wheels 22 form the driving wheels of the intelligent manned robot in the second embodiment. Front wheel 21 adopts as universal wheel or mecanum wheel. The rear wheel 22 is a driving wheel, and the front wheel 21 is driven by the rear wheel 22 . The electrical box 2 is located below the first supporting bracket 61 and is fixedly connected to the first supporting bracket 61 . The seat cushion bracket 3 , the leg bracket 4 and the backrest bracket 5 are installed...
Embodiment 3
[0100] refer to Figure 17 to Figure 21 , The difference between the third embodiment and the second embodiment lies in the installation structure of the traveling wheels.
[0101] refer to Figure 17 and Figure 18 , in this embodiment, the driving wheels of the intelligent manned robot include two driving wheels 71 installed in the middle of the first bearing bracket 61, two front universal wheels 72 installed in the front of the first bearing bracket 61, and two front universal wheels 72 installed in the middle of the first bearing bracket 61. Two rear universal wheels 73 at the rear of the support bracket 61 . The two driving wheels 71 are installed on the fourth extension 66 of the first supporting bracket 61 and are respectively located on the left and right sides of the fourth extension 66 . The fourth extension piece 66 is located in the middle of the first supporting bracket 61 . The two driving wheels 71 are respectively driven by two geared motors 70 . Both gea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More