Simulated vehicle traffic for autonomous vehicles
A technology for autonomous driving, virtual vehicles, applied in the field of simulated vehicle traffic for autonomous vehicles, which can solve the problems of difficult coordination and control, high cost, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
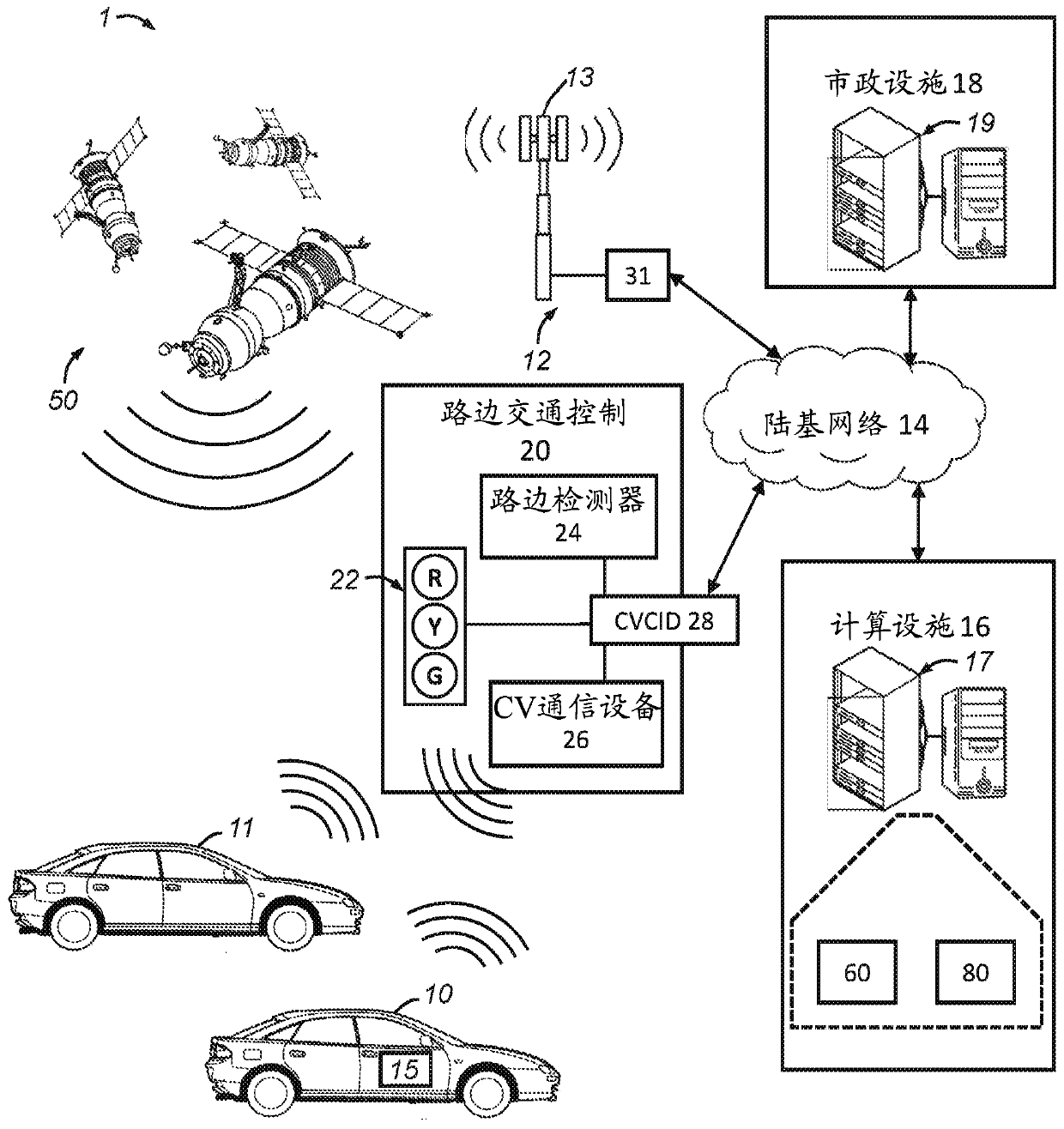
[0049] The systems and methods described herein enable the testing of truly networked autonomous vehicles (CAVs) using augmented reality on the road, adding simulated environmental objects such as additional vehicles, pedestrians, and other obstacles to the vehicle under test. can be seen in the surrounding environment. This is typically done by running a real-time simulation synchronized with the operation of the CAV on the road, using a mapping model of the traffic control system and road used in the test and real-time vehicle state information of the CAV under test. With this information, the simulation can add virtual elements, such as other vehicles moving along the road, and these virtual elements can be fed back to the CAV again in real-time to act as sensor input data for the CAV, causing the CAV to incorporate these additional simulated Vehicles and other objects are treated as real objects that exist in the environment in which they operate. This allows the construc...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap