

Underdriven fruit and vegetable picking manipulator and picking method
A manipulator and under-actuated technology, which is applied in the field of agricultural robots, can solve the problems of difficulty in grasping fruit and vegetable picking, high difficulty in manipulator control, and easy finger interference, etc., to achieve good grasping effect, convenient picking, and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
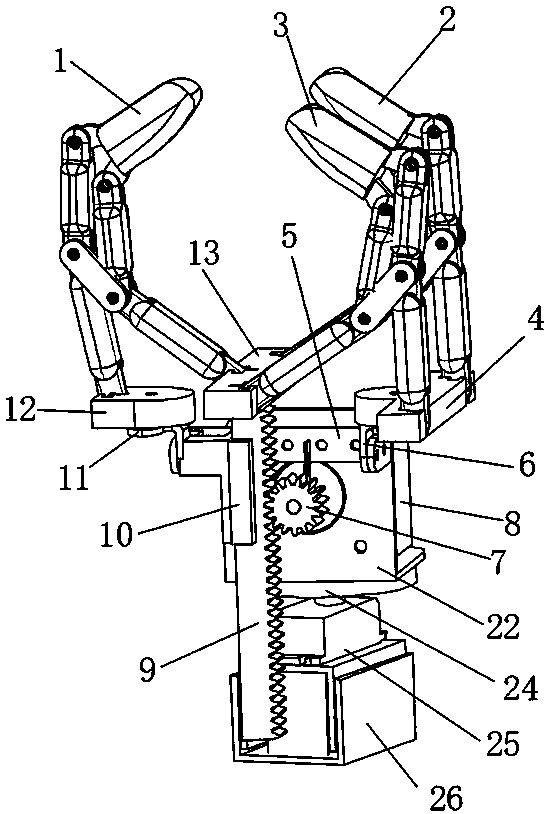
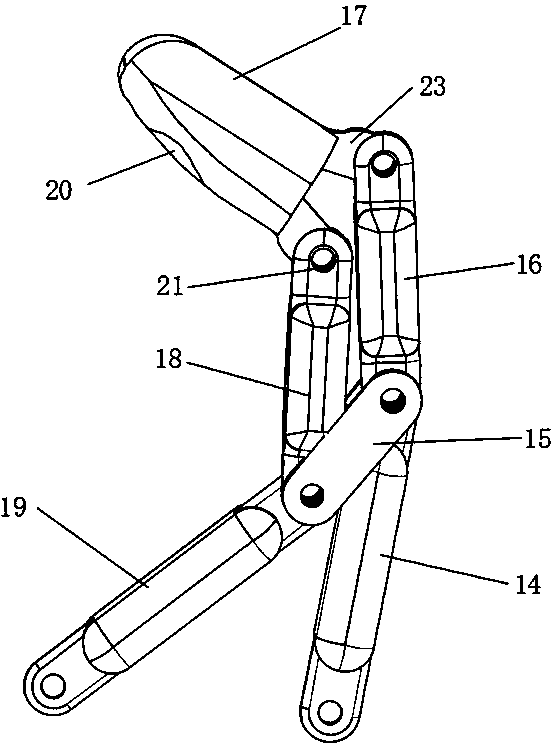
[0022] Embodiment: a kind of under-actuated fruit and vegetable picking manipulator, such as Figure 1-4 As shown, it includes a finger mechanism and a base 22; the base 22 is provided with a stepper motor 8, and the output end of the stepper motor 8 is provided with a gear 7; the side of the base 22 is provided with a rack fixture 10 , the rack fixing part 10 is provided with a rack 9 meshing with the gear 7, and the rack 9 and the rack fixing part 10 are clearance fit; the upper end of the rack 9 is connected with a transmission connecting plate 13; the base The upper end of the side of 22 is provided with a third connecting piece 5, the third connecting piece 5 is U-shaped and has a plurality of through holes; the two sides of the third connecting piece 5 are respectively connected with the first connecting piece 11 and the second connecting piece 6. The first connecting piece 11 and the second connecting piece 6 are angled, and the vertical ends are respectively connected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More