3d3c-vsp imaging processing method, device and equipment
A technology of imaging processing and migration imaging, which is applied in measurement devices, seismic signal processing, geophysical measurement, etc. It can solve the problems of inaccurate iso-velocity fields at both ends of the imaging section and poor hyperbolic characteristics of the gathers of common imaging points.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
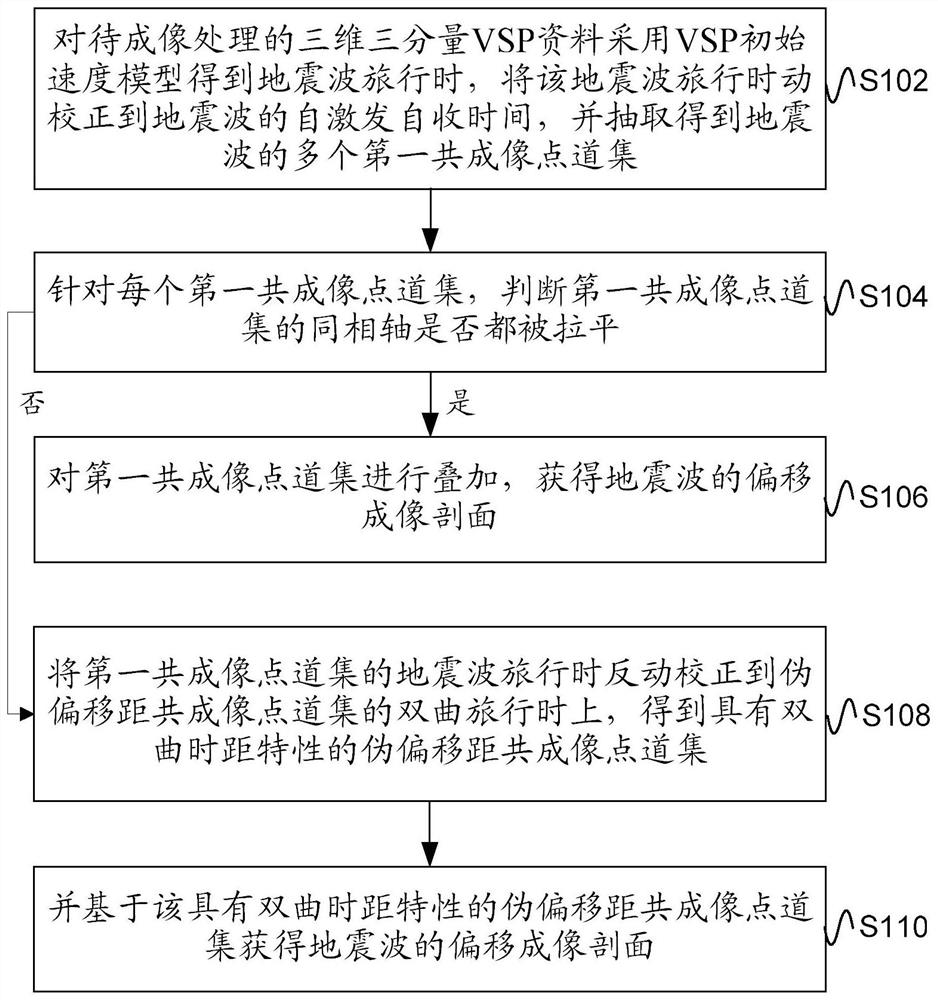
[0056] figure 1 Schematic flow chart of the 3D3C-VSP imaging processing method provided for the embodiment of this specification Figure 1 , this method can be applied in the related technical fields of 3D3C-VSP, such as image 3 As shown, the 3D3C-VSP imaging processing method includes the following steps:
[0057] S102, using the VSP initial velocity model to obtain the travel time of the seismic wave for the three-dimensional three-component VSP data to be imaged, correcting the travel time of the seismic wave to the self-excitation and self-receiving time of the seismic wave, and extracting multiple first common imaging points of the seismic wave set;
[0058] In the conventional common image point gather extraction process based on the VSP initial velocity model, such as figure 2 As shown, the shot point S excites seismic waves, and the seismic waves are scattered at the underground imaging point O (scattering point O for short), and are received by the underground re...
Embodiment 2
[0078] This embodiment is on the basis of embodiment one, to figure 1 The shown 3D3C-VSP imaging processing method is extended and supplemented.
[0079] Figure 4 Schematic flow chart of the 3D3C-VSP imaging processing method provided for the embodiment of this specification Figure II , step 108 is refined in this method, that is, the above step 108 may specifically include:
[0080] S108-2, keep the offset of the seismic wave unchanged, translate the shot point and receiver point to the pseudo-shot point and pseudo-receiver point on the surface, and project the pseudo-shot point and pseudo-receiver point to the imaging point of the seismic wave on the surface the distance is equal;
[0081] Specifically, such as image 3 As shown in , let the SR distance be x, keep the distance between SRs constant, and translate the SR to the detector side to S"R", where S" and R" are the pseudo-shot point and pseudo-receiver point respectively. C is the midpoint of S"R", and S"C=R"C=...
Embodiment 3
[0106] corresponding to the above figure 1 , Figure 4 , Figure 5 The described 3D3C-VSP imaging processing method is based on the same technical idea, and the embodiment of this specification also provides a 3D3C-VSP imaging processing device. Figure 8 A schematic diagram of the module composition of the 3D3C-VSP imaging processing device provided by the embodiment of this specification, which is used to execute figure 1 , Figure 4 , Figure 5 Describe the 3D3C-VSP imaging processing method as Figure 8 As shown, the device includes: gather extraction module 201, gather judgment module 202, imaging processing module 203 and reaction correction module 204;
[0107] The gather extraction module 201 uses the VSP initial velocity model to obtain the seismic wave travel time for the three-dimensional three-component VSP data to be processed, corrects the seismic wave travel time to the self-excitation and self-reception time of the seismic wave, and extracts multiple first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More