External parameter estimation method and system for vehicle-mounted look-around multi-camera system
A multi-camera and external parameter technology, applied in the field of multi-camera systems, can solve problems such as large requirements for the site, difficulty in calibrating the external parameters of the vehicle-mounted surround view multi-camera system, and no overlapping areas of the cameras.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
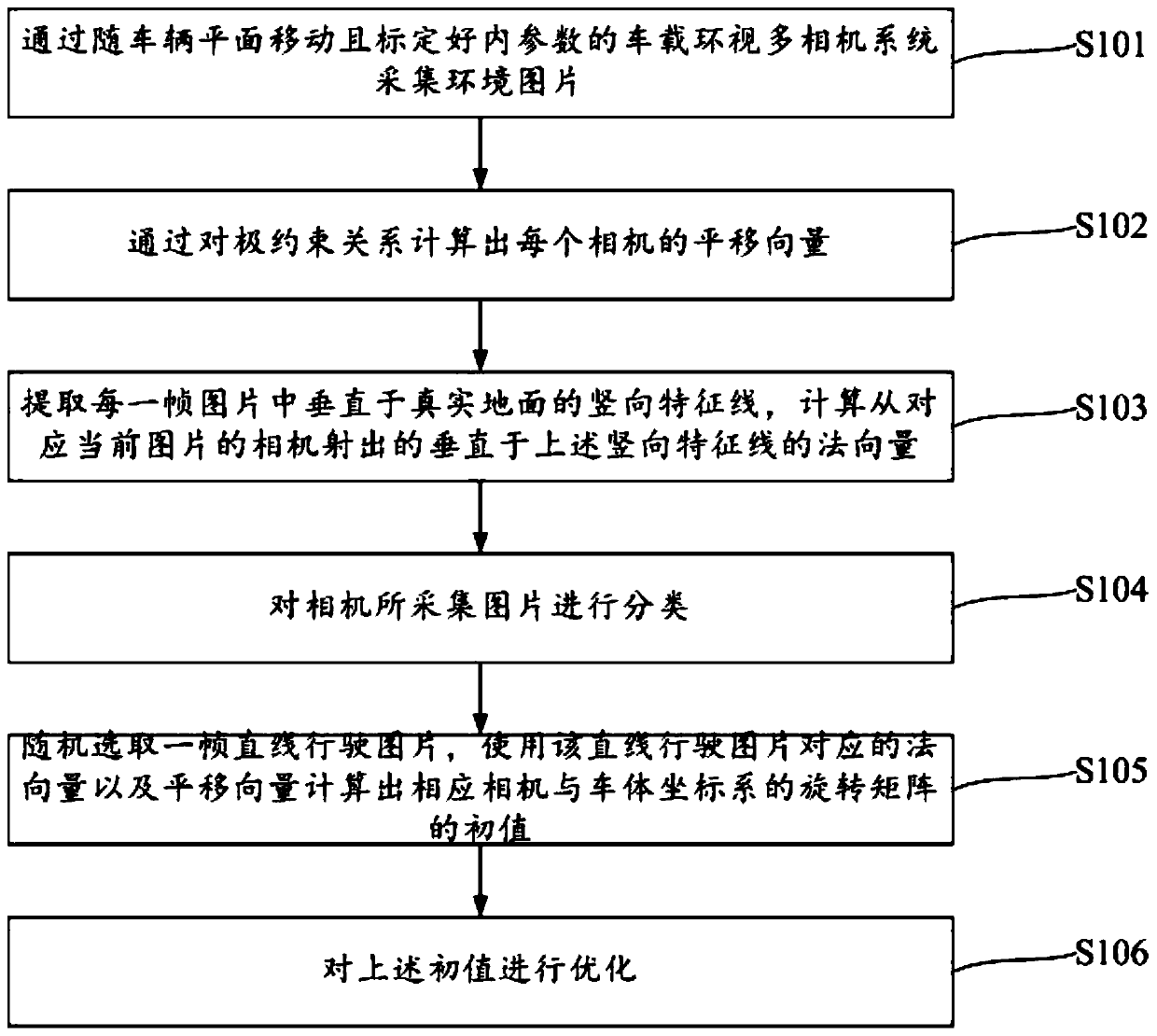
[0057] like figure 1 As shown, a method for estimating external parameters of a vehicle-mounted surround-view multi-camera system includes:
[0058] S101. Collect environmental pictures through the vehicle-mounted surround-view multi-camera system that moves with the vehicle plane and has calibrated internal parameters.
[0059] After starting the camera, let the vehicle drive on a plane as much as possible, and the environment requires appropriate line features and feature points. The vehicle needs to walk a straight line of about 5 meters and a curve of 5 meters, so that enough frames can be collected.
[0060] S102. Detect feature points and feature lines in the pictures collected by each camera (see figure 2 as well as image 3 ), match the feature points of adjacent frames (see Figure 4 ), calculate the translation vector of each camera through the following polar constraint relationship and the rotation matrix
[0061]
[0062] Among them, c represents the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com