

A biped robot gait control method and biped robot
A biped robot and gait control technology, applied to electric controllers, controllers with specific characteristics, motor vehicles, etc., can solve problems such as walking failure, biped robot fall, robot body posture deviation, etc., to achieve The effect of ensuring walking stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to make the purpose, technical solutions, and advantages of the embodiments of the present application clearer, the embodiments of the present application will be further described in detail below in conjunction with the accompanying drawings. Here, the exemplary embodiments of the application and their descriptions are used to explain the application, but not to limit the application.
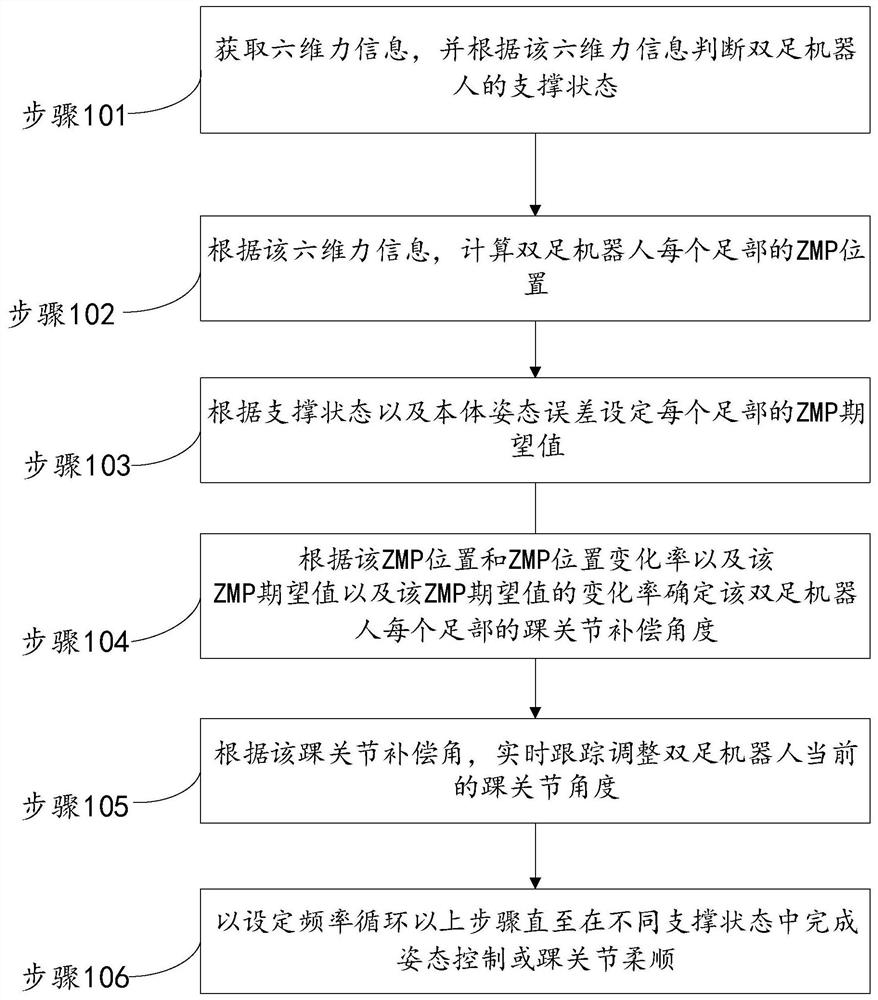
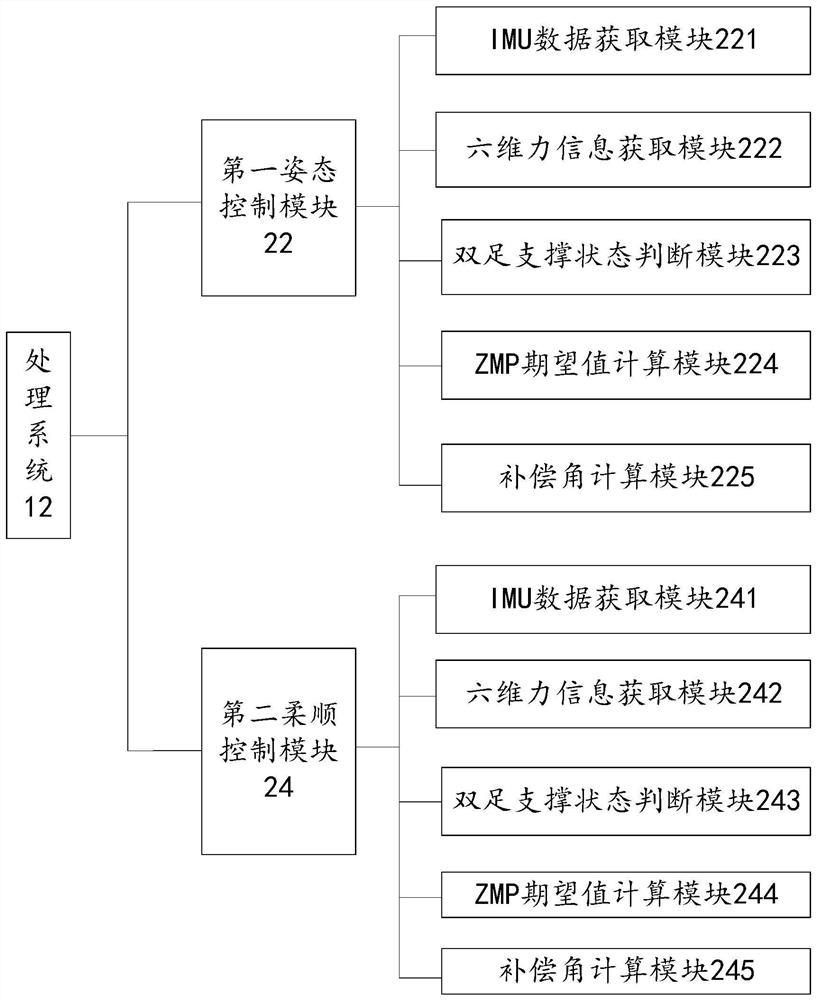
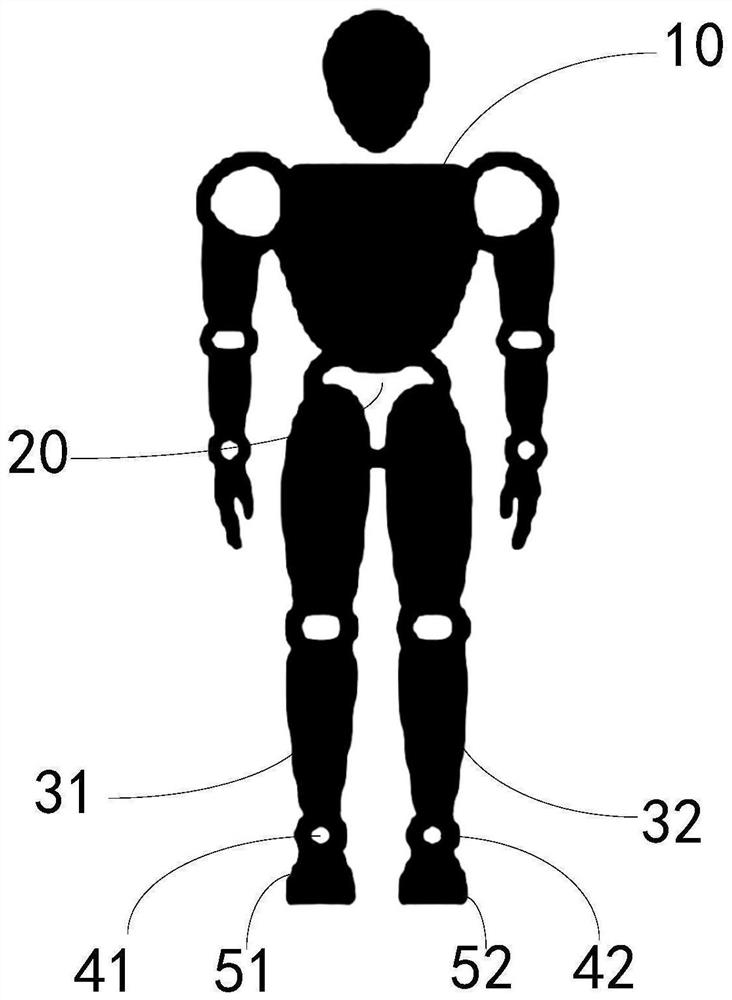
[0053] Such as figure 2As shown, the present application relates to a biped robot gait control method, using the inertial measurement unit 20 data of the biped robot's own attitude control, integrating the data of the six-dimensional force sensor set on the biped, and when the biped robot walks under external force or unstable complete posture correction.
[0054] In this method, the six-dimensional force sensor arranged on the soles of the first foot 31 and the second foot 32 of the biped robot detects the supporting states of the biped robot, such as single foot, double foo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More