

Unmanned aerial vehicle mountainous region priority rescue path planning method
A path planning, UAV technology, applied in vehicle position/route/altitude control, non-electric variable control, instruments, etc., can solve the problem that UAV path planning cannot perform priority rescue, etc., to improve rescue efficiency and accuracy degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
[0045] It should be understood that terms such as "having", "comprising" and "including" used herein do not exclude the presence or addition of one or more other elements or combinations thereof.
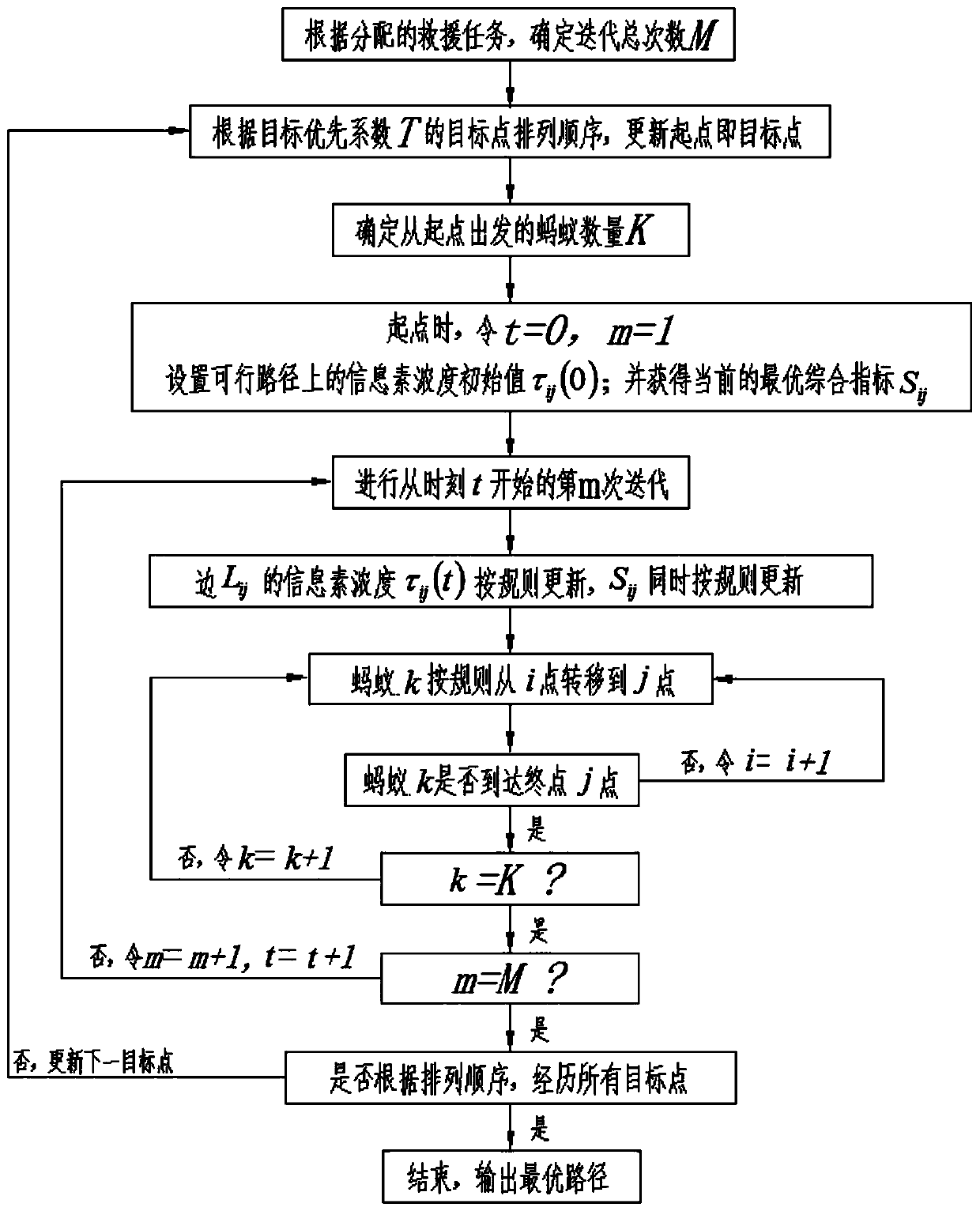
[0046] In one technical solution, the UAV mountain priority rescue path planning method includes:
[0047] Obtain the target position that needs to be rescued, and use the line segment of the Thiessen polygon generated by the target position range based on the obstacle point as the feasible solution of the initial flight path;
[0048] Construct path safety constraints, and select the edge L of Thiessen polygon that satisfies the safety constraints for the feasible solution ij , side L ij is the edge between adjacent vertices i and j of the Thiessen polygon, i and j are two posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More