A calibration device and method based on multi-laser ranging and angle measurement
A calibration method and calibration point technology, which is applied in the direction of measuring devices, optical devices, image analysis, etc., can solve problems such as angle insensitivity, camera position setting errors, and difficulty in accurately determining angles, so as to improve synthesis accuracy and improve synthesis Speed, the effect of improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
[0039] 3D Acquisition Calibration Process
[0040] When the target object to be collected is B, the calibration object A can be placed around the B at this time, but in many cases the calibration object A cannot be placed near the target object B. At this point you can:
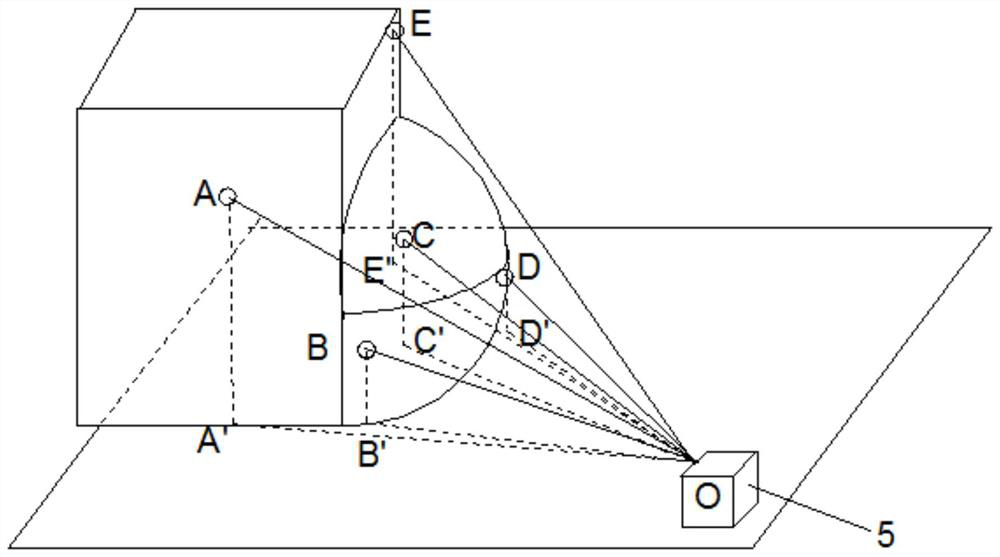
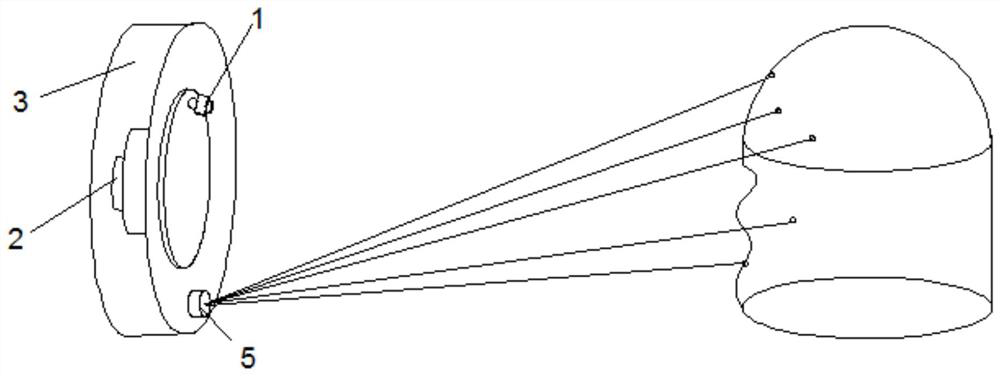
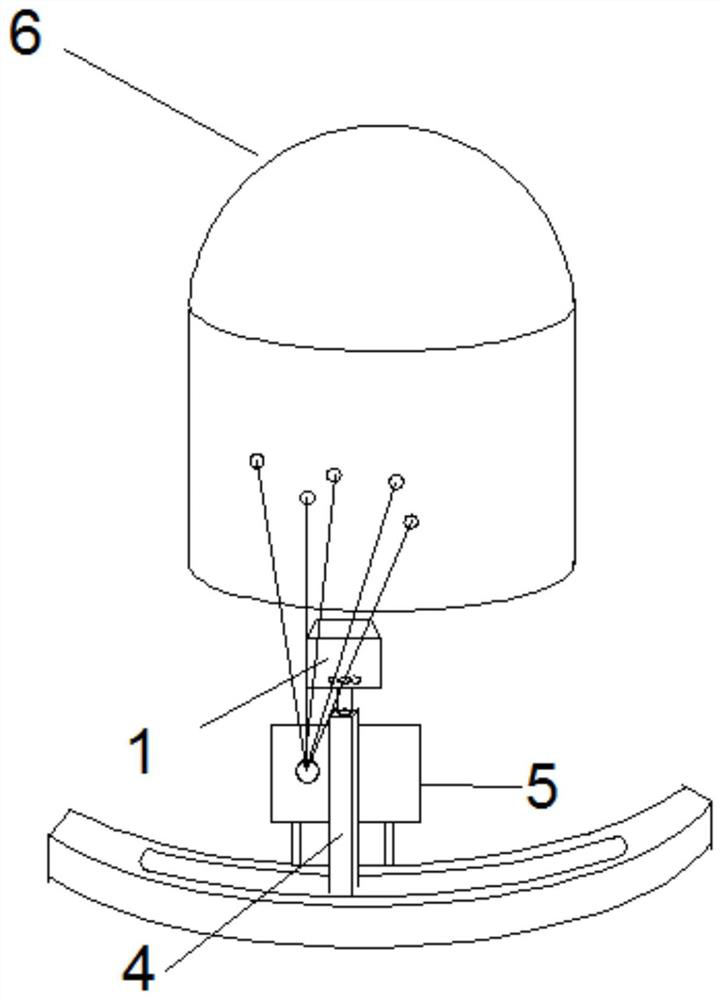
[0041] 1. Use the calibration device 5 to measure the distances and inclinations of multiple calibration points on the target.
[0042] Please refer to figu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More