Multi-robot path rapid planning method applied to storage environment
A multi-robot, path planning technology, applied in the direction of instruments, vehicle position/route/height control, control/regulation systems, etc., can solve problems such as increasing the complexity of the problem and difficult to solve the problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. Note that the aspects described below in conjunction with the drawings and specific embodiments are only exemplary, and should not be construed as limiting the protection scope of the present invention.
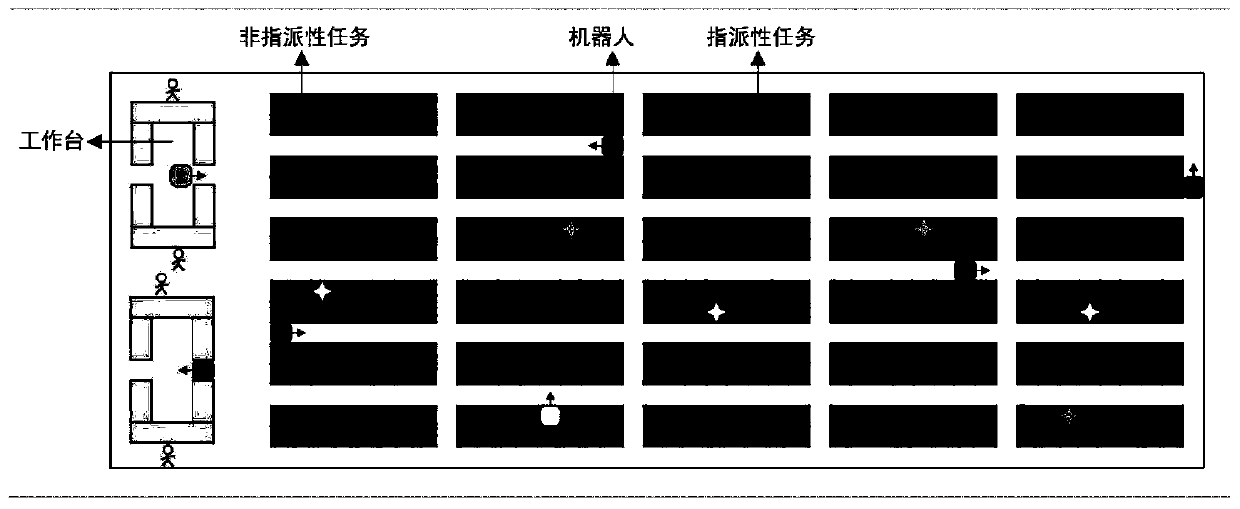
[0038] Step 1: The storage environment is built according to the real storage environment through MATLAB, and shelf obstacles are set up, such as figure 2 shown;
[0039] Step 2: Multiple assigned tasks or non-assigned tasks in the environment, and specify the starting point and target point of multiple robots;
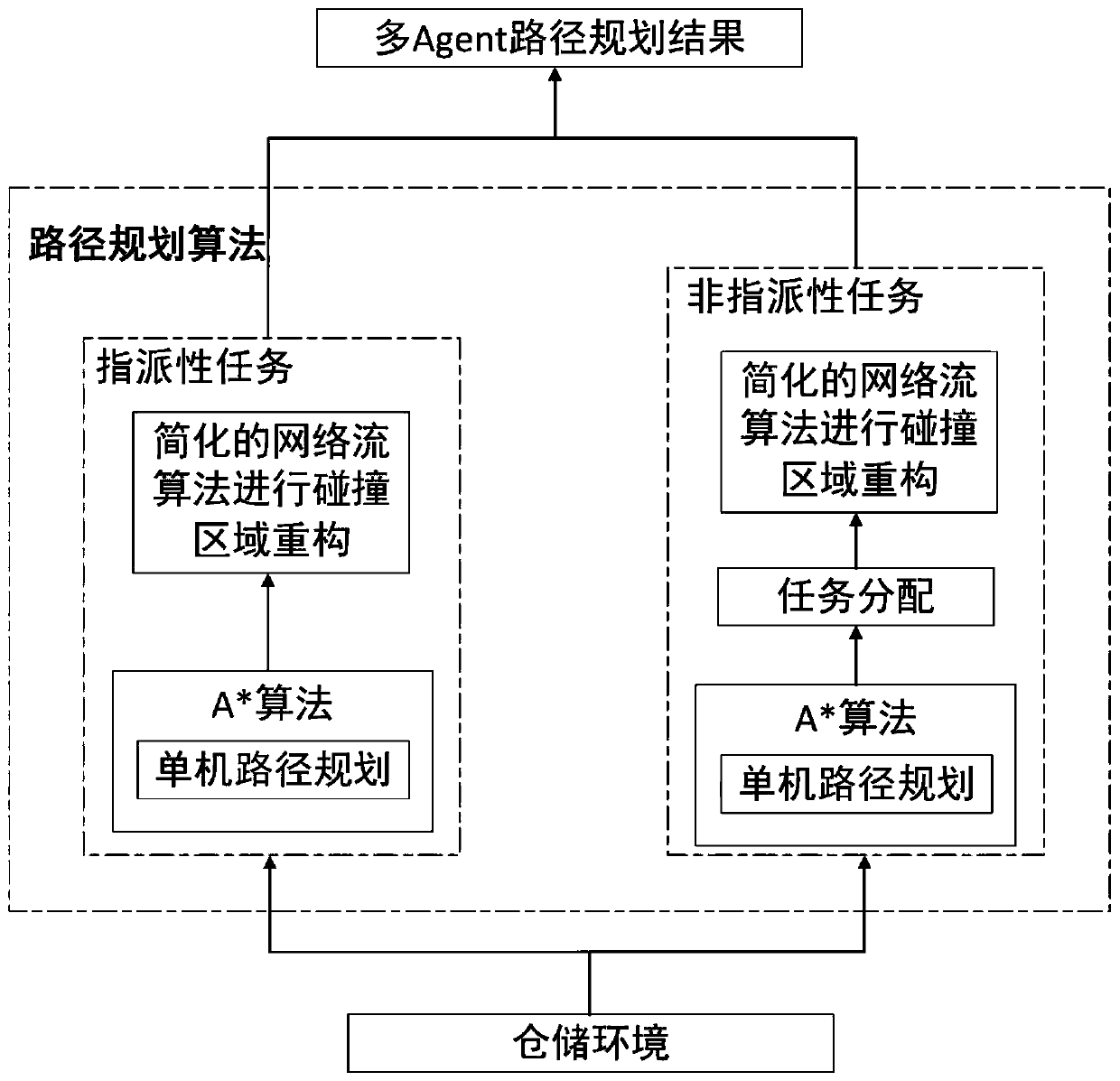
[0040] Step 3: If it is an assigned task, the remaining steps are Step 4 to Step 8; if it is a non-assigned task, the remaining steps are Step 9 to Step 20;
[0041] Step 4: Use the A* algorithm to plan the path of each robot;
[0042] Step 5: Sorting the multiple areas where collisions occurred in chronological order;
[0043] S...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap