

Intelligent ship collision avoidance path planning method based on heading and navigational speed
A path planning and smart ship technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
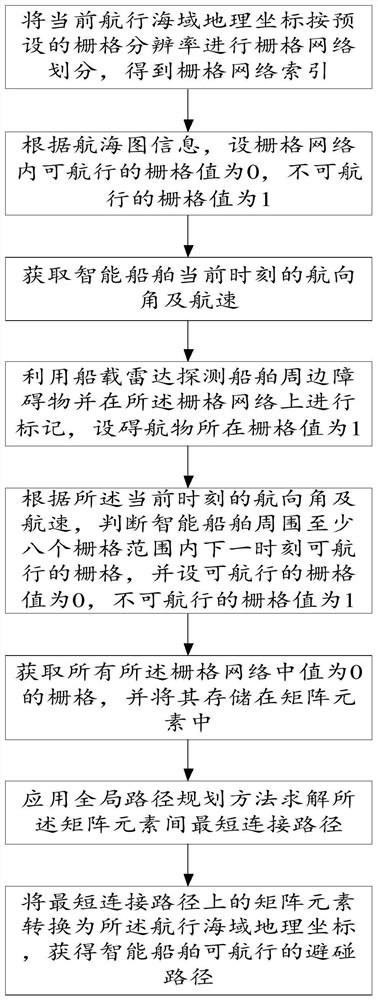
[0063] This application discloses a path planning method for intelligent ship collision avoidance based on heading and speed, the flow chart of which is as follows figure 1 As shown, the method includes the following steps:
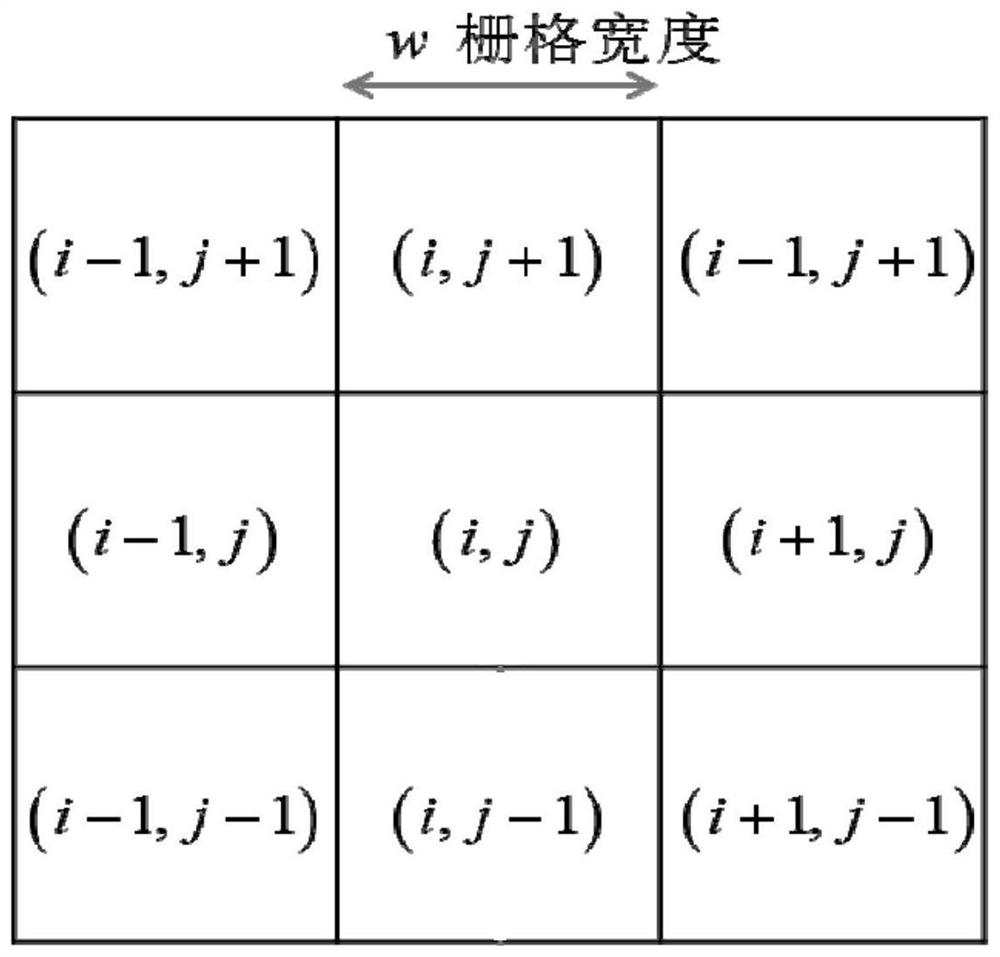
[0064] Step 1: Divide the geographic coordinates of the current navigation sea area into a grid network according to the preset grid resolution, such as figure 2 As shown, the geographic coordinates are converted into a dimensionless matrix through the following operations, and the grid network index is obtained as:
[0065]
[0066] Among them, (i, j) represents the grid network index, the symbol int represents rounding, (x, y) is the geographic coordinates of the navigation sea area, the unit is meter (m), w is the grid resolution (ie grid width), The unit is meter (m), and min means to take the minimum value fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More