

Unmanned aerial vehicle path planning method based on Monte Carlo tree search
A path planning, UAV technology, applied in vehicle position/route/altitude control, instruments, 3D position/channel control, etc., can solve high time and space costs, cannot be directly applied to dynamic environments, and affects system migration throughput It can reduce the time complexity, improve the path planning efficiency, and reduce the training time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention is implemented based on the path planning method of Monte Carlo tree search based on the following scenarios:
[0025] A scenario model of mobile edge computing is established, and the UAV acts as a mobile edge server to provide services for a group of users on the ground. For the convenience of calculation, the UAV can only fly at given K fixed points, and the flight time is discretized into M time slots. In each time slot, each user will send a task offloading request to the UAV, and the number of user tasks obeys the Gaussian distribution; the UAV will fly from the current fixed point to another fixed point, and provide one of the users with service, usually selecting the user closest to the drone. And the position of the user in each time slot changes dynamically.
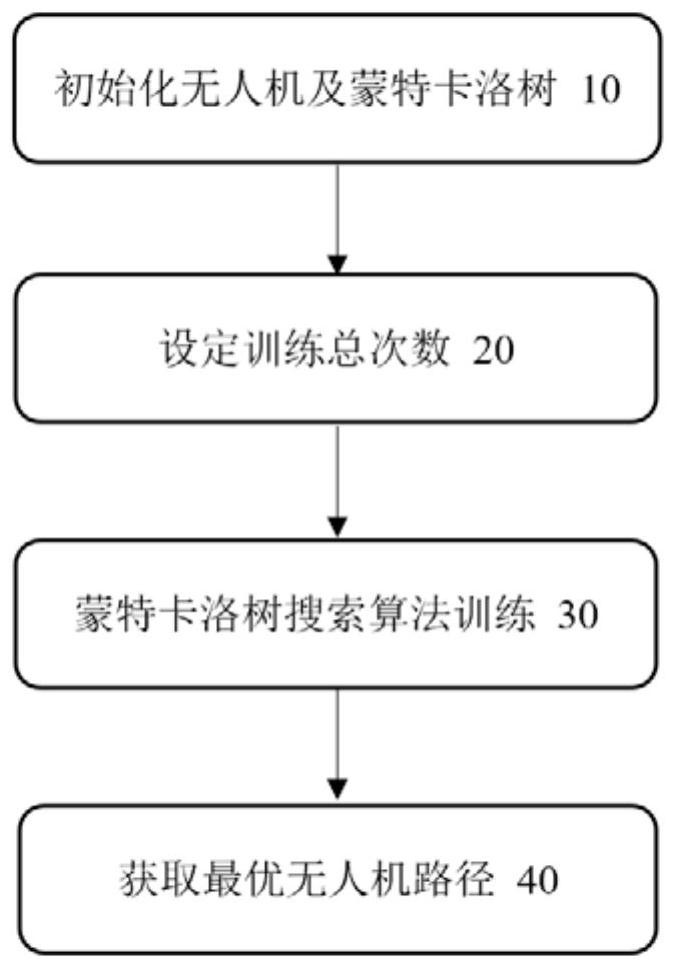
[0026] Such as figure 1 As shown, the path planning method based on Monte Carlo tree search of the present invention includes the following steps: (10) Initialize the UAV and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More