

Local path planning method based on path point offset
A technology of local path planning and waypoints, applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control, etc. Adapt to changes and other problems to achieve the effect of less calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below with reference to the accompanying drawings, so that those skilled in the art can implement the present invention in detail.
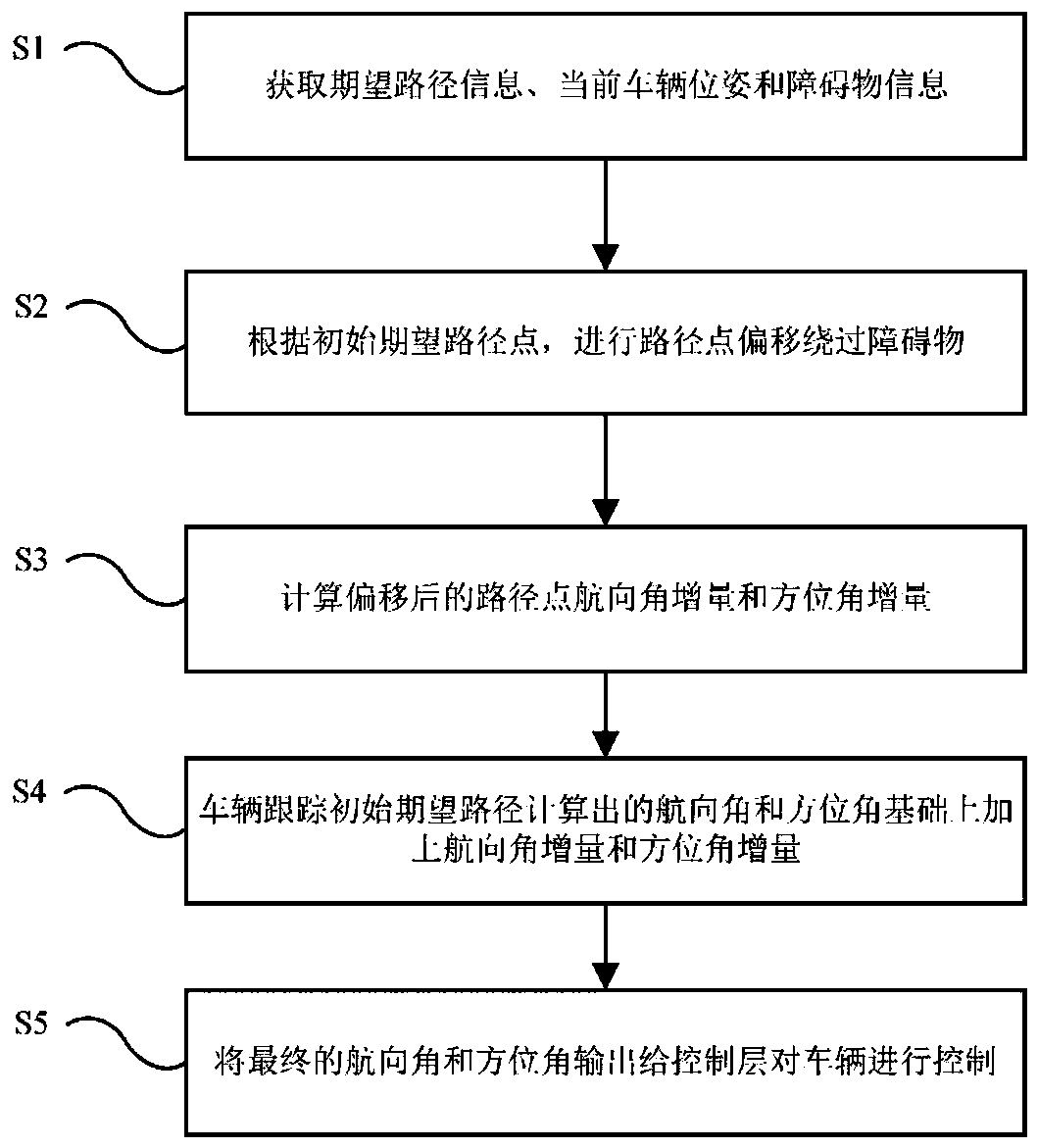
[0038] The embodiment of the present invention provides a local path planning method based on path point offset, such as figure 1 shown, including the following steps:
[0039] S1: Obtain desired path information, current vehicle pose and obstacle information;
[0040] S2: According to the information obtained in S1, perform the initial expected path point offset to bypass the obstacle;
[0041] S3: Calculate the course angle increment and azimuth angle increment of the offset path point according to the offset point of S2;
[0042] S4: The heading angle and azimuth angle calculated by the vehicle tracking the initial desired path, on this basis, add the heading angle increment and azimuth angle increment in S3;
[0043] S5: Output the heading angle and azimuth angle of S4 to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More