

Light sensation test calibration method and device and electronic equipment
A calibration method and technology of equipment to be tested, applied in measurement devices, photometry, optical radiation measurement, etc., can solve the problems of low production efficiency, many manual operations, complicated operations, etc., to improve production efficiency, improve accuracy and adaptive effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. the embodiment. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
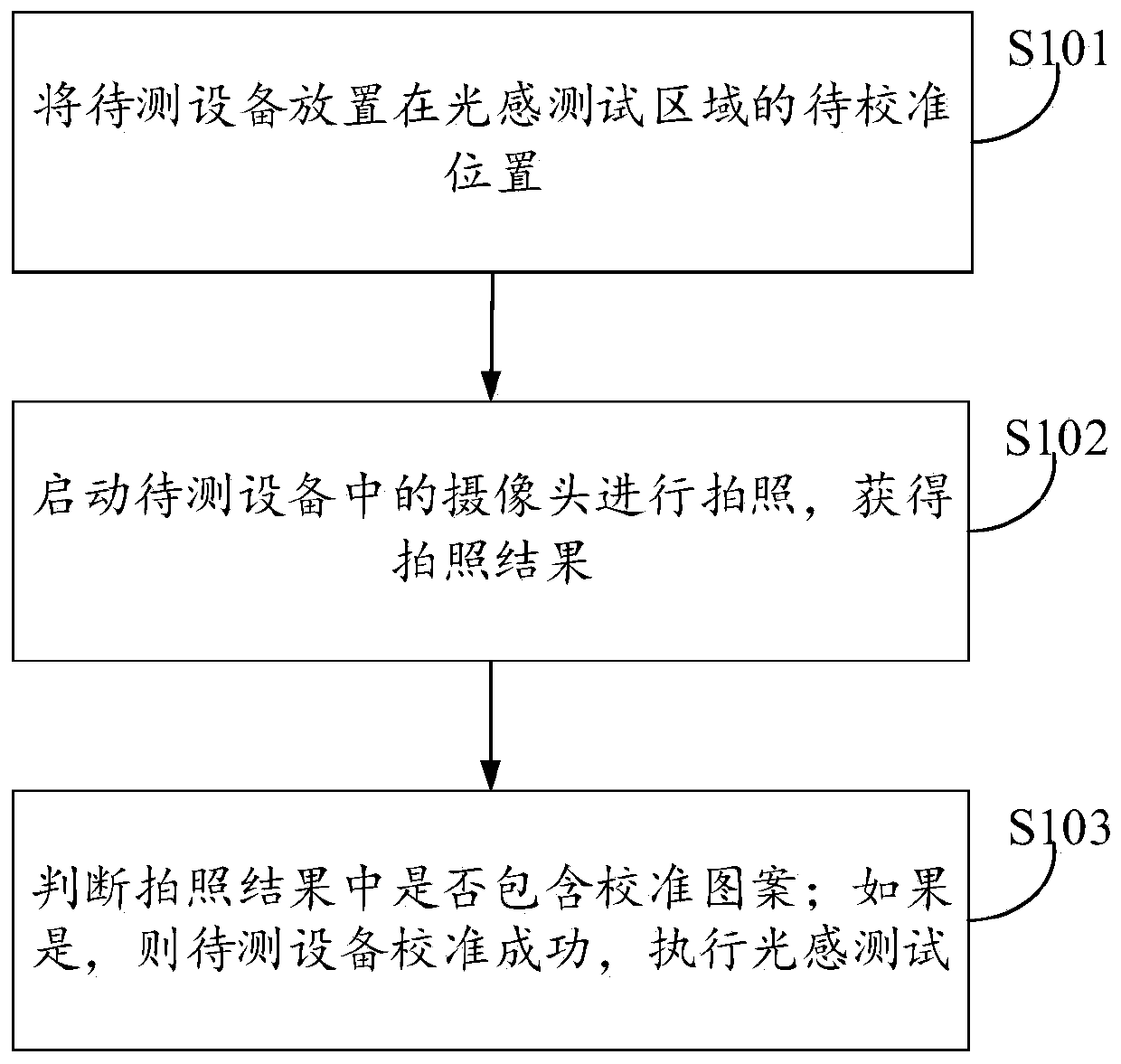
[0038] The photosensitive device in the smart device is a component used to sense the surrounding light, through which the intensity of the surrounding light is obtained to control the brightness of the screen, and is usually used in smart phones and notebook computers. Due to the high sensitivity and high integration of photosensitive devices, strict testing is required during the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More