

Target satellite rocket docking ring capture point positioning method based on double-mechanical-arm capture
A dual robotic arm and docking ring technology, which is applied to measuring devices, instruments, and optical devices, can solve problems that depend on image feature point matching capabilities, and achieve stable and easy to implement measurement processes, improve positioning accuracy, and image calculation requirements. low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
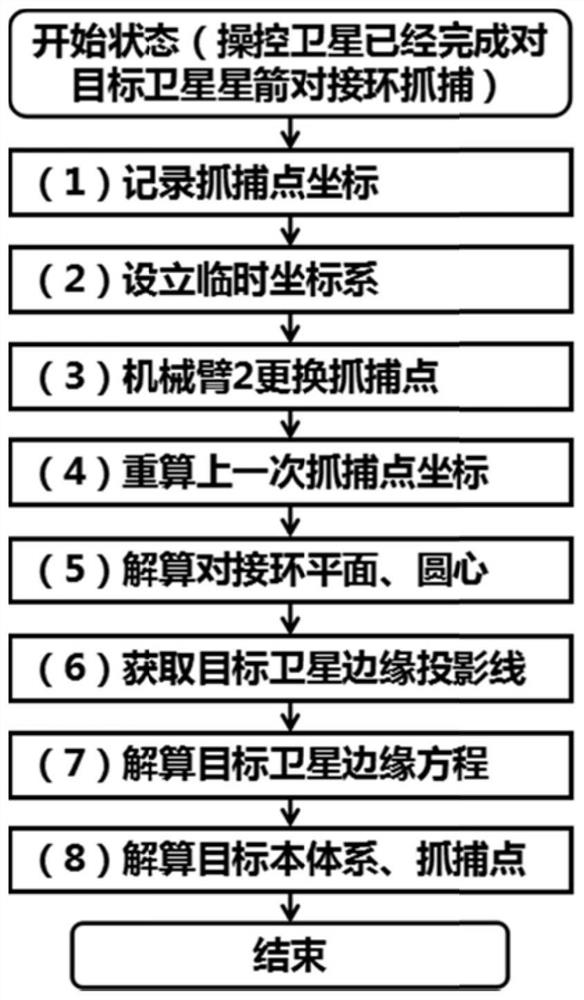
[0077] Take the capture of the target satellite by a satellite with two arms as an example, assuming that in the coordinate system of the target satellite body, the coordinates of the origin of the coordinate system of the control satellite body are (0,-0.25,-1), and the coordinates of the capture point of the robotic arm 1 are ( -0.3535,-0.3535,0), the capture point coordinates of robotic arm 2 are (0,-0.5,0), and the coordinate axis of the control satellite system is parallel to the coordinate axis of the target satellite system, such as figure 1 Shown, the concrete steps of the present invention are as follows:
[0078] (1) For the manipulative satellites that have completed the dual-arm capture of the target satellite's star-rocket docking ring, establish a satellite motion reference coordinate system, and record the positions of the two capture points;
[0079] In the coordinate system of the manipulator satellite body, the coordinates of the capture point of the robot ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More