Intelligent optimization method and system for multi-unmanned aerial vehicle cooperative inspection of multiple towers
A multi-drone, intelligent optimization technology, applied in the field of intelligent optimization, multi-drone collaborative inspection and multi-tower inspection, can solve the problems of not realizing multi-drone coordination, not giving full play to the advantages of coordination, and low inspection efficiency , to achieve the effect of complete and clear task process, cost reduction and clear division of labor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the objectives, technical solutions and advantages of the present invention clearer, the embodiments of the present invention will be further described in detail below with reference to the accompanying drawings.
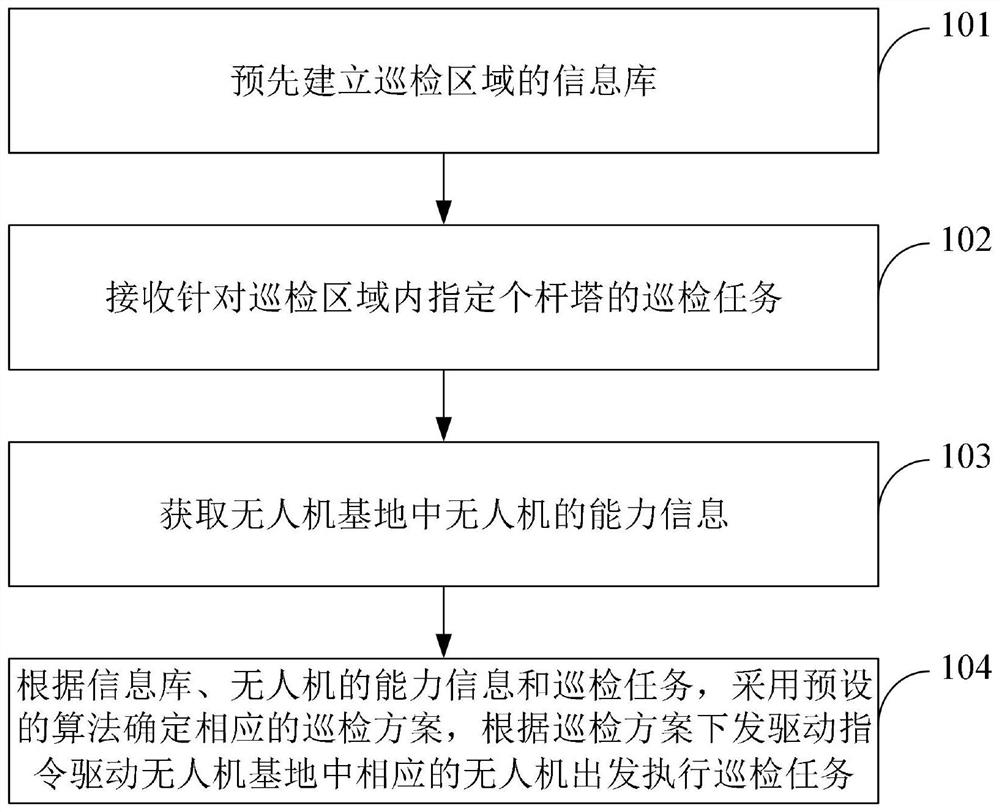
[0041] Embodiments of the present invention provide an intelligent optimization method and system for multi-unmanned aerial vehicle cooperative inspection of multiple towers, based on the cooperative cooperation of multiple unmanned aerial vehicles to inspect multiple towers in an inspection area. Usually, in an inspection area, there are several towers waiting for inspection. The inspection time consumed by each tower is known and varies. Multiple UAVs in the UAV base are responsible for the inspection. Therefore, it is necessary to perform task assignment and path planning for each UAV. After completing the task, all UAVs return to the base.
[0042] see figure 1 , an embodiment of the present invention provides an intelligent optimization...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com