

Robot intelligent self-adaptive compliance control method under unknown environment
A technology of compliant control and unknown environment, applied in the direction of program control of manipulators, instruments, manipulators, etc., can solve problems such as loss of tracking ability, large tracking error of impedance control force, and large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
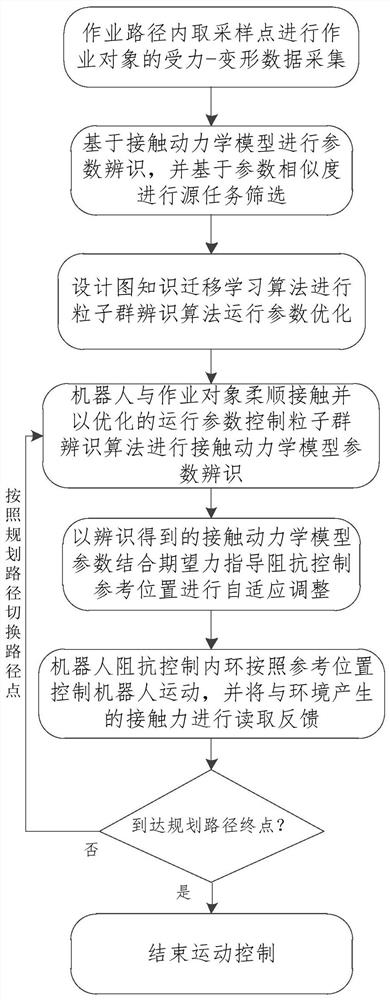
[0110] This embodiment is an intelligent adaptive compliant control method for robots in an unknown environment oriented to skin operations, such as figure 1 shown, including the following steps:
[0111] Step 1: Take a small number of local sampling points on the working object in the target working path of the robot, and the robot performs normal motion sampling on the local sampling points to obtain the force data and position data of the end of the robot;
[0112]The robot operation path refers to the path where the robot end effector and the operation object are planned in advance in the application scenario where the robot is in physical contact with the operation object; the few local sampling points are the operations taken in the same skin area. 1 to 2 path points on the path; the force data at the end of the robot refers to the contact force in the z-axis direction of the end tool coordinate system collected by the force sensor at the end of the robot. The origin of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More